Sur ce blog je propose la construction d'un autogire Radio Commandé. L'idée me trottine dans la tête depuis bien longtemps, c'est décidé, demain 16 mars 2009 vous me trouvez dans mon atelier....la création commence. Que dire de mon atelier ?...il fait 40 m2 mais il n'y a presque plus de place pour circuler. Un tour, une fraiseuse, une perceuse, une scie à onglet ( métal bois plastique ) un poste à soudure TIG, un coin électronique, un coin studio photo me bouffent pas mal de surface. Il faut bien ça pour parvenir à ses fins. Bricoleur dans l'âme, mon atelier c'est mon domaine. Il y a quelques années j'occupais une petite pièce dans la maison mais très vite le manque de place se faisait sentir. J'ai retroussé mes manches et me suis mis à la construction de mon atelier. La maçonnerie , la charpente, la toiture, l'électricité, le carrelage, la plomberie, les huisseries, le crépi, ça ne me fait pas peur. Après huit mois de boulot , mon atelier m'ouvre sa porte...quel bonheur et que de temps passé depuis !.
Le petit amateur en modélisme n'a pas à avoir peur, l'autogire que je vais réaliser sera le plus simple possible. On trouvera l'essentiel du matériel dans les grandes surfaces de bricolage mais pour certaines pièces il faudra trouver un copain qui sache tourner et fraiser ..Quelques informations: la motorisation sera électrique, moteur brushless avec pré-lanceur, l'autogire sera de type propulsif à trois pales à battement . Le diamètre du rotor fera 2m et le poids total de l'engin pas plus de 3.5Kg. Sacré challenge ...alors au boulot. J'ai glané de nombreuses informations sur l'autogire, je me sens en mesure de venir à bout de cette réalisation. Construire un tel engin ce n'est pas tout ..mais il doit voler et là je vous avoue je suis novice. Je viens de m'acheter un simulateur de vol Phoenix Version 2, le seul à ma connaissance à offrir le pilotage d'un autogire. Depuis avec ma télécommande Multiplex Profi 3030 je m'entraîne à l'ordinateur.
Lundi 16 Mars 2009
Comme promis j'ai passé quelques heures dans mon atelier. Mais avant tout j'aimerais citer le nom de Mr Jean Cousin qui par son site traitant des autogires mérite largement le nom de Monsieur Autogire. Un conseil, il est indispensable de visiter ce site( scale Autogiro).
Voilà ça c'est fait. Avant de commencer la construction de notre autogire on va lui donner une abréviation soit BR01.
J'ai donc fouiner dans mes armoires et tiroirs pour trouver les éléments entrant dans la composition de notre engin. Le moteur principal sera un brushless AXI 4130/20, le moteur de pré-lancement rotor, un brushless Apollo MC28-3009. Les contrôleurs, pour Axi, Jeti Hacker Master 77-0-Flight 3-10 Lipos, pour Apollo, Jeti Hacker Masterspin 44 2-6 Lipos. Une hélice APC-E 16x10 doit me fournir une poussée de 3 Kg . Alimentation 2 packs Graupner de 3 Lipos 3200mA montage en série. En ce qui concerne les servos 2 Robbe RS600 et un Multiplex. La télécommande choisie, ma Multiplex Profi 3030 avec son récepteur. Pour le rotor j'ai selectionné deux roulements 6x6x19 ainsi que 6 rotules Unibal femelle de 3mm et une de 4 mm. Pour le châssis des profilés en aluminium anodisé 15x15 en 1mm d'épaisseur ( monsieur bricolage ) ainsi que quelques tiges creuses carbone 5mm ( récupération de flèches tir à l'arc....j'ai fait de la compétition ). A ma disposition de nombreuses rotules en plastique de 3mm. Voilà le plus gros du matos+ accessoires..3 roues 110mm, quelques plaques de Dépron 3mm et 6mm et des vis écrous M3 et M4. Pour le poids je pense être dans le cadre des 3.5 Kg maxi prévu pour notre BR01. Avec tous ces éléments on va pouvoir penser grossièrement les plans. Une idée, on fait la pièce, on adapte au mieux, puis direction la balance de précision. Un gramme est un gramme et beaucoup de grammes ça fait le poids.
Mardi 17 Mars 2009
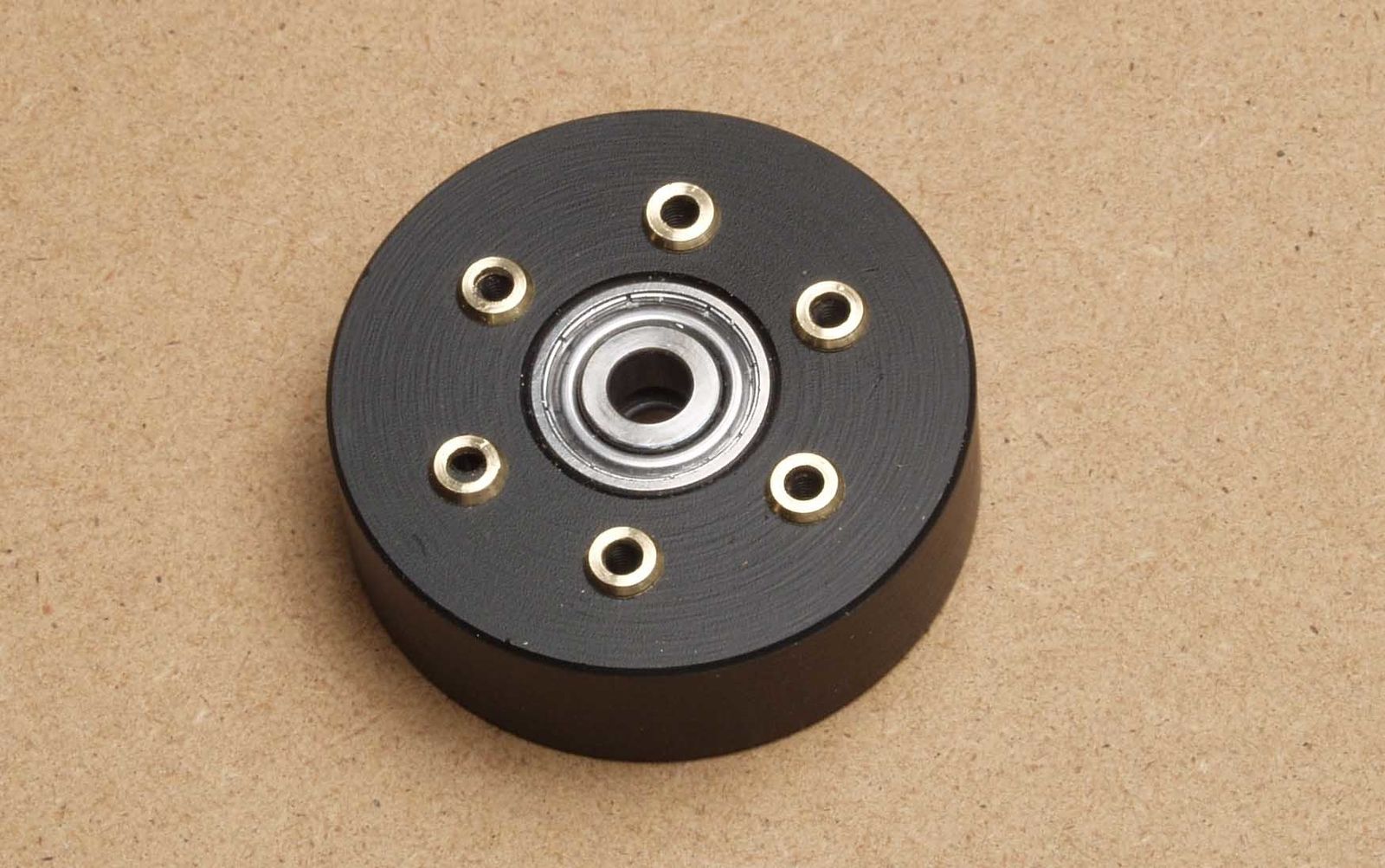
Aujourd'hui je commence la fabrication du rotor de notre BR01. Cette pièce est essentielle dans toute la construction de l'autogire, ça doit être de l'horlogerie suisse. J 'ai ma petite idée sur ce que je vais faire. De suite je me coupe un bout de Delrin (POM) de 25mm d'une barre pleine de 50mm de diamètre, pour y usiner au tour le moyeu. Fixé dans le mandrin je dresse les deux faces pour obtenir une cote de 23mm puis j' usine au diamètre de 50 toute la longueur. Je retire la pièce du mandrin et la place sur mon plateau diviseur de la fraiseuse. Cela va me permettre de percer 6 trous de 2.5mm traversants à un angle de 60º sur un diamètre de 30mm. Je retourne sur le tour et perce au centre de la pièce un trou traversant de 10mm . Je possède une fraise à lamage de 19mm avec guide de 10mm, cette dernière me permet d'effectuer rapidement les logements des roulements, profondeur 6mm mais pour l'instant qu'un seul côté de la pièce sera fait. Je retourne la pièce dans le mandrin , avec un outil à tronçonner je coupe dans la pièce un disque de 5mm d'épaisseur que je récupère pour la suite. On dresse à nouveau la pièce sur le mandrin à une cote définitive de 15mm. Avec la même fraise j'effectue le second logement de roulement, le trou de 10mm je l'agrandis à 14mm.

Le moyeu est terminé, on place les roulements, ça force, ils sont serrés, c'est impeccable. Il ne me reste plus qu'à tarauder les 6 trous de 2.5 avec un taraud à main M3. Du disque que je viens de couper je dresse la face coté tronçonné à une épaisseur de 4mm , j' agrandis le trou central à 12mm pour permettre le passage d'une clé à pipe de 8, les trous de 2.5mm sont repercés à 3mm. Ce disque va servir de renfort à la fixation des rotules.
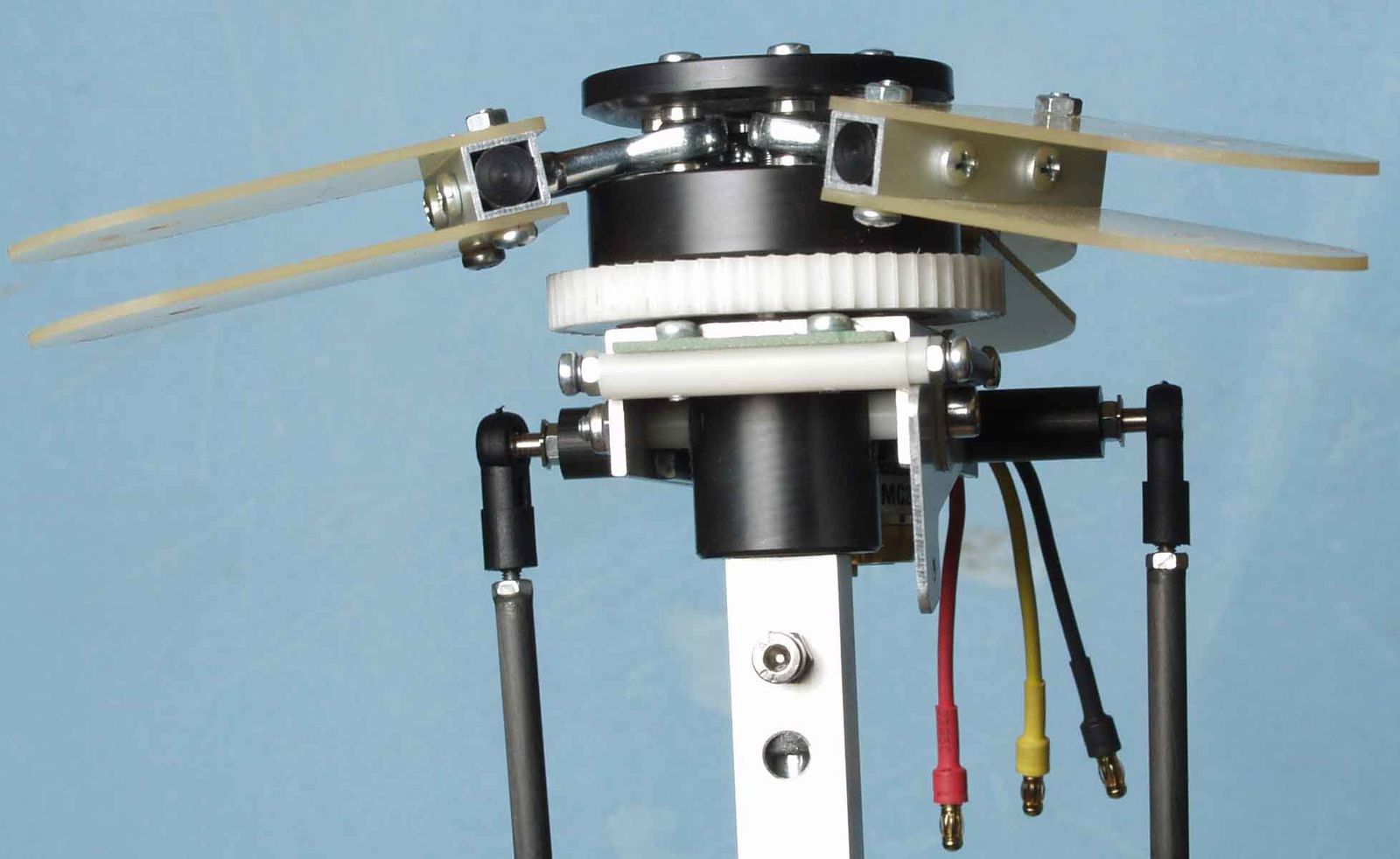
Voilà ce que l'on obtient en fixant les rotules Unibal de 3mm. Ces dernières vont permettre la fixation des pales. On peut remarquer que les 2 rotules du bas sont fixées sur un profilé aluminium carré plein de 10x10mm longueur 40, centrées et espacées de 15 mm. Aux extrémités de ce profilé 2 trous traversants M3 espacés de 30mm
Sous les rotules on va placer des petites entretoises traversées par les vis M3 afin d'ajuster le débattement vers le bas. Les rotules doivent venir en butée sur le moyeu avec un angle maxi de 10º. Vers le haut on placera le disque de renfort, les 6 vis passeront par le disque les rotules et le moyeu. Cette fois ci, de nouvelles entretoises entre les rotules et le disque limiteront le débattement vers le haut à 14º. Les rotules viendront également en butée sur le disque de renfort.

Toutes ces entretoises sont difficiles à réaliser car petites, diamètre 6, percé à 3, épaisseur 2 à 3mm.Le montage, moyeu, rotules, entretoises, disques se fait par les 6 vis M3 de 20mm. Il faut vérifier le bon débattement des rotules, ça ne doit pas forcer, elles doivent tomber librement en butée sur le moyeu ainsi que le disque. Important, il faut vérifier que les entretoises ne viennent pas abîmer la bague de bronze des rotules car le débattement maxi de ces dernières est de +/ - 16º.
A présent on va réaliser l'axe de ce rotor. Pour cela on usine une petite barre d'acier inox de 12 mm de diamètre longueur 19 mm. Sur toute sa longueur on perce un trou de 3.2 mm puis avec un taraud M4 on effectue le filetage traversant. Sur une longueur de 14.5 mm on tourne l'axe au diamètre de 6 (coulissant légèrement dur) pour le montage des roulements. La pièce terminée une vis M4 L=30 va pouvoir fixer l'axe sur un support quelconque. La vis traverse l'axe et le dépasse même de plusieurs mm. On place le moyeu sur son axe, une rondelle de 4 plus un écrou M4 nylstop fixeront le moyeu. On serre à fond mais comme l'alcool, avec modération, les roulements se placent , on vérifie la bonne rotation, puis on desserre légèrement l'écrou. Voilà, c'est fait, on peut regarder, c'est beau et ça tourne comme dans du beurre.Je suis content de ma journée, la suite de la construction demain.
Pour information, il faut noter que les pales qui seront en balsa ont un certain poids ( 50g ), elles exercent suite à la force centrifuge une traction non négligeable proportionnelle au carré de la vitesse de rotation, ce qui signifie plus de 10Kg par pale. Attention donc à la sécurité, on utilisera en aucun cas des rotules en plastique, attention, à haute vitesse ça part comme une fronde. En temps voulu on effectuera les calculs plus précis..
Mercredi 18 Mars 2009
Je viens de recevoir les engrenages en Delrin qui vont me servir pour le pré-lancement du rotor. La grande couronne a 70 dents et le pignon 12 dents. Le montage est relativement simple, il suffit de profiter des trous filetés existants sur le moyeu pour y adapter la couronne. Un petit usinage de cette dernière est à réaliser, je ne rentre pas dans les détails. La couronne sera vissée par le bas, 3 vis M3 suffisent.
.

Voici une photo de l'axe que j'ai réalisé hier.

Dans une plaque d' époxy de 1.5mm d' épaisseur j'ai découpé avec ma Dremel les éléments qui vont tenir les pales. Ces dernières ont une épaisseur de 7mm le montage ne posera donc pas de problème. J' attends toujours les pales, commandées chez Aérobalsa. Comme on peut le remarquer, le rotor comporte 3 pales et ceci pour bien des raisons. La plus importante est que 3 pales donnent plus de stabilité et plus de portance que 2. Une autre raison est d'ordre pratique, en effet pour le transport dans un véhicule il est aisé de pouvoir replier les pales et ainsi gagner de la place


Cette image montre le moyeu, la couronne, le disque et les porte- pales montés...ça prend de la gueule !!!
Aujourd'hui je me suis fixé l'objectif de réaliser l'axe de pivotement de ce moyeu complet. Comme pour le battement des pales je vais également utiliser une rotule Unibal mais de 4mm cette fois ci. La pièce que je viens de réaliser est aussi en Delrin, elle a pour fonction de maintenir la rotule et de se fixer dans un profilé en aluminium, tube carré 15x15 en 1mm d' épaisseur. La partie haute de cette pièce est fraisée avec une fraise de 6mm ce qui permet le passage de l'axe d' inclinaisons (tangage et roulis). Cet axe de 4 mm ne peut pas tourner dans le plan horizontal, il est bloqué. Le rotor ne peut que s'incliner de gauche à droite et d'avant en arrière, c'est exactement ce qu'il me faut. La aussi je ne rentre plus dans les détails de l'usinage, les photos parlent d'elles-mêmes. Pour maintenir l'axe, c'est à dire la vis de 4mm, deux entretoises en Delrin le positionnent centré. Dans la partie basse, celle qui se loge dans le tube carré, une vis de 4 mm maintient la rotule. Dans cette même partie un trou fileté permet par le moyen d'une vis de bloquer l'ensemble dans le tube carré. Voilà pour aujourd'hui, demain est un autre jour....à suivre.


Jeudi 20 Mars 2009
Je me suis pris la journée pour planifier la suite de la construction du BR01. Maintenant que le rotor et l'axe de pivotement sont réalisés, il me faut construire la pièce intermédiaire reliant les deux pièces précitées. On peux remarquer que la couronne de pré-lancement est fixée directement sur le moyeu, c'est intentionnel car une roue libre n'est pas adaptable techniquement. Les raisons sont que mon axe rotor est fixe et que la distance plan des pales et axe de pivotement du rotor doit être la plus courte possible afin de limiter les efforts des servos. La solution que j'ai choisie c'est un moteur de pré-lancement sur glissière qui entraîne le rotor puis se désengage de la couronne à vitesse de rotation suffisante des pales.
Ce désengagement se fait automatiquement par une faible inclinaison en arrière du rotor ou si l'on veut par l'action d'un servo...il faut voir. Un profilé en U 40x20x20 en aluminium anodisé de 2mm qui me souriait au fond de mon atelier, va me permettre de réaliser la pièce intermédiaire .Sur le dessus de la pièce 40 mm se fixe l'axe rotor et sur les deux côtés de 20 l'axe de pivotement. Je dois donc ajuster les entretoises de l'axe de pivotement pour bien centrer la rotule à l'intérieur du U. Pour réduire au maximum la distance plan rotor et axe de pivotement, ce dernier doit être placé judicieusement. Le moteur de pré-lancement monté sur une plaque époxy va coulisser sur deux glissières et est rappelé en position désengagé par deux petits ressorts. Un loquet ajustable permet de bloquer le moteur en position entraînement, le loquet débloqué, le moteur se désengage automatiquement. Toujours sur ce profilé en U viendront se fixer deux rotules en plastique pour la commande des servos. Ma télécommande affiche une fonction Delta ce qui me mène à positionner mes servos adéquats. Pour une télécommande ne possédant pas cette fonction, les servos seront indépendants, un pour roulis et le second pour le tangage, le positionnement devra être différent. Voilà mes intentions, c'est du boulot en perspective......maintenant il me faut un peu de temps pour réaliser tout ça. Les photos seront disponibles dès que possible.
Si des lecteurs intéressés par le sujet ont des commentaires à faire ou même des encouragements à formuler, qu'ils n' hésitent pas, au moins je ne fais pas ce blog que pour le fun !! ....à suivre.
Dimanche 22 Mars 2009
Pour ceux qui visitent mon site, certains se demandent ce qu'il m'arrive.....depuis jeudi rien de publié....j'ai honte mais il y avait l'anniversaire de ma compagne à fêter de plus c'est un chiffre rond que par courtoisie je ne divulgue pas.
Revenons à nos moutons....le BR01 se construit. Pour preuve, voici quelques photos de cette fameuse pièce intermédiaire. Je suis content de moi, c'est de la belle mécanique et ça fonctionne comme un mécanisme d' horlogerie suisse.

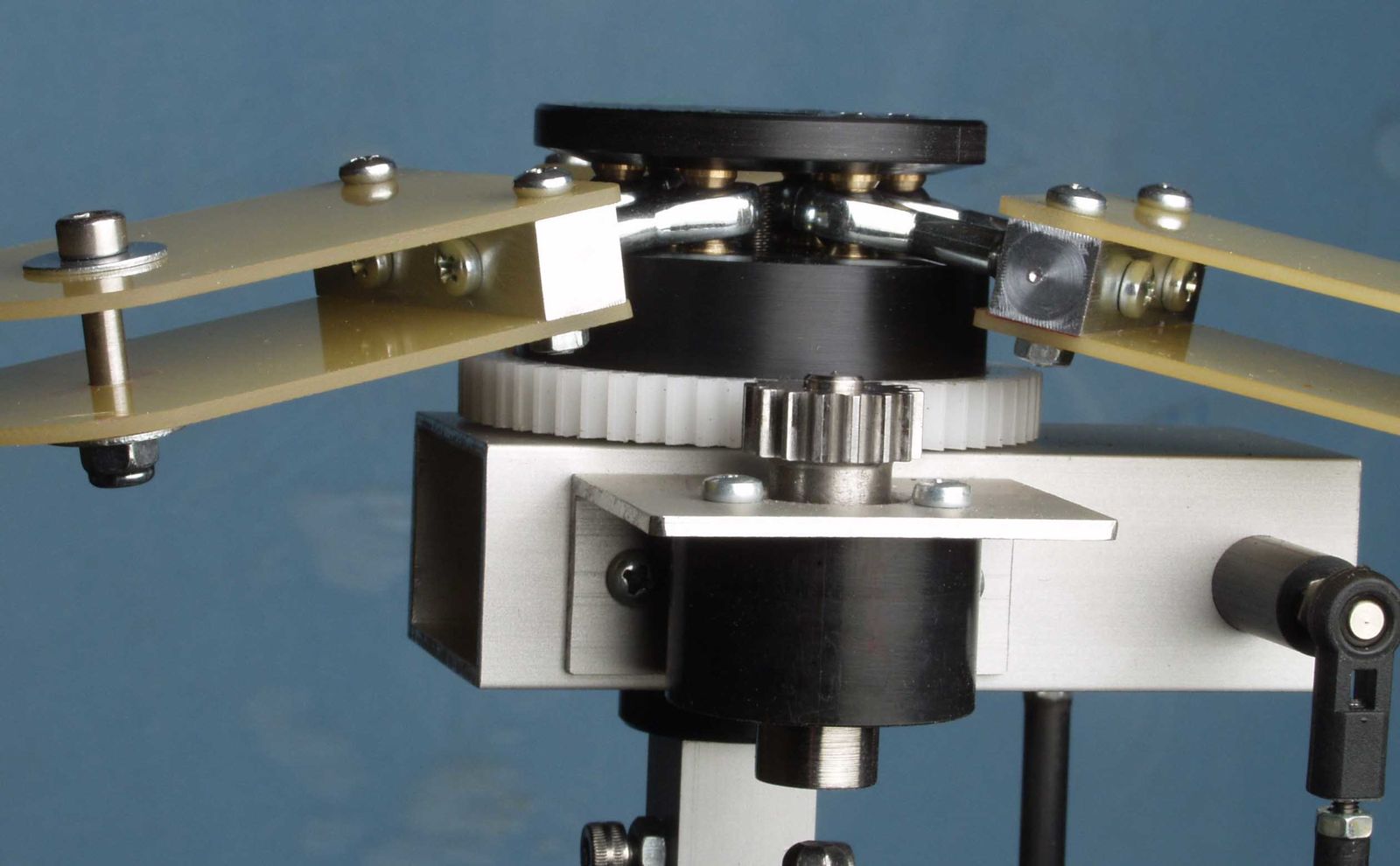
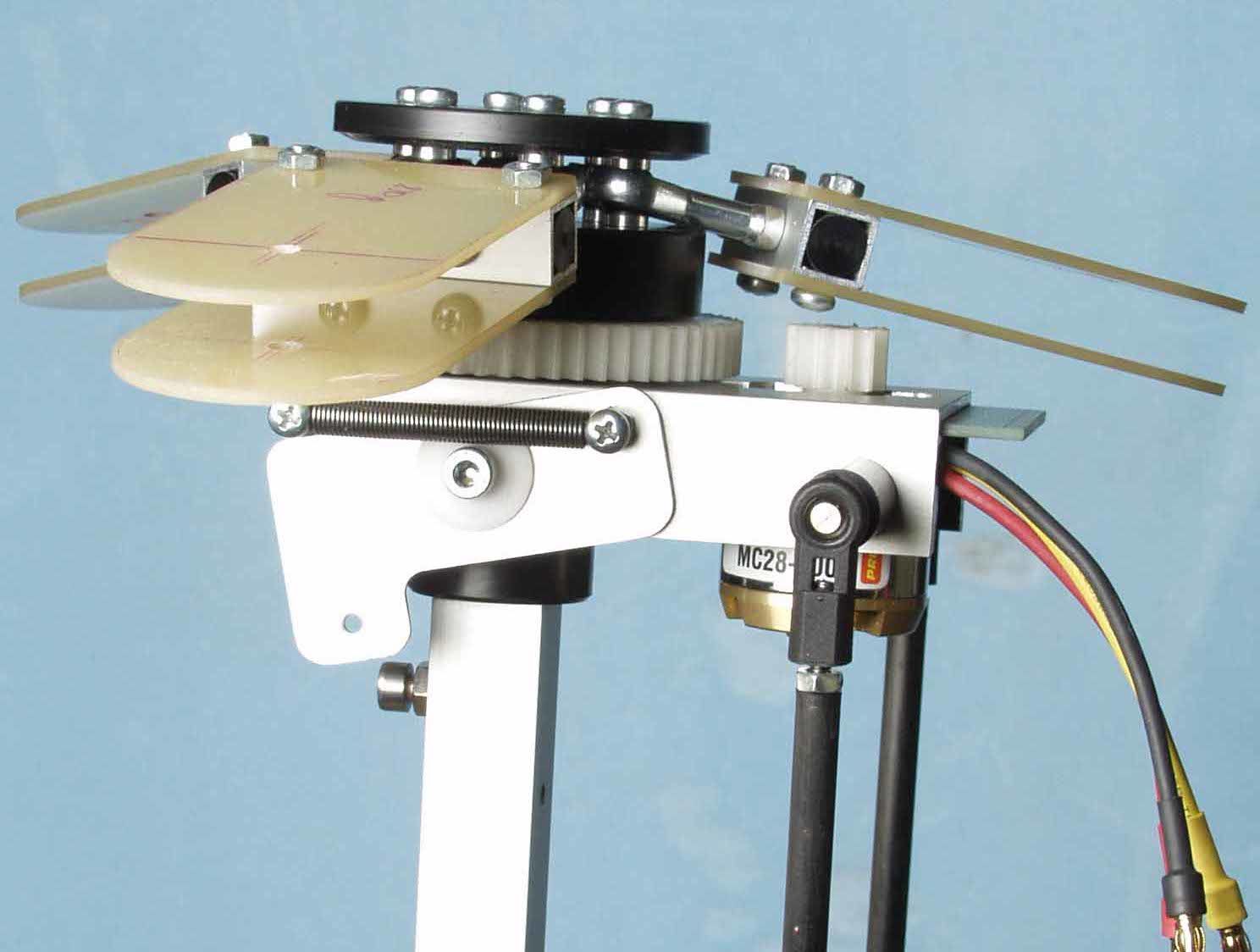
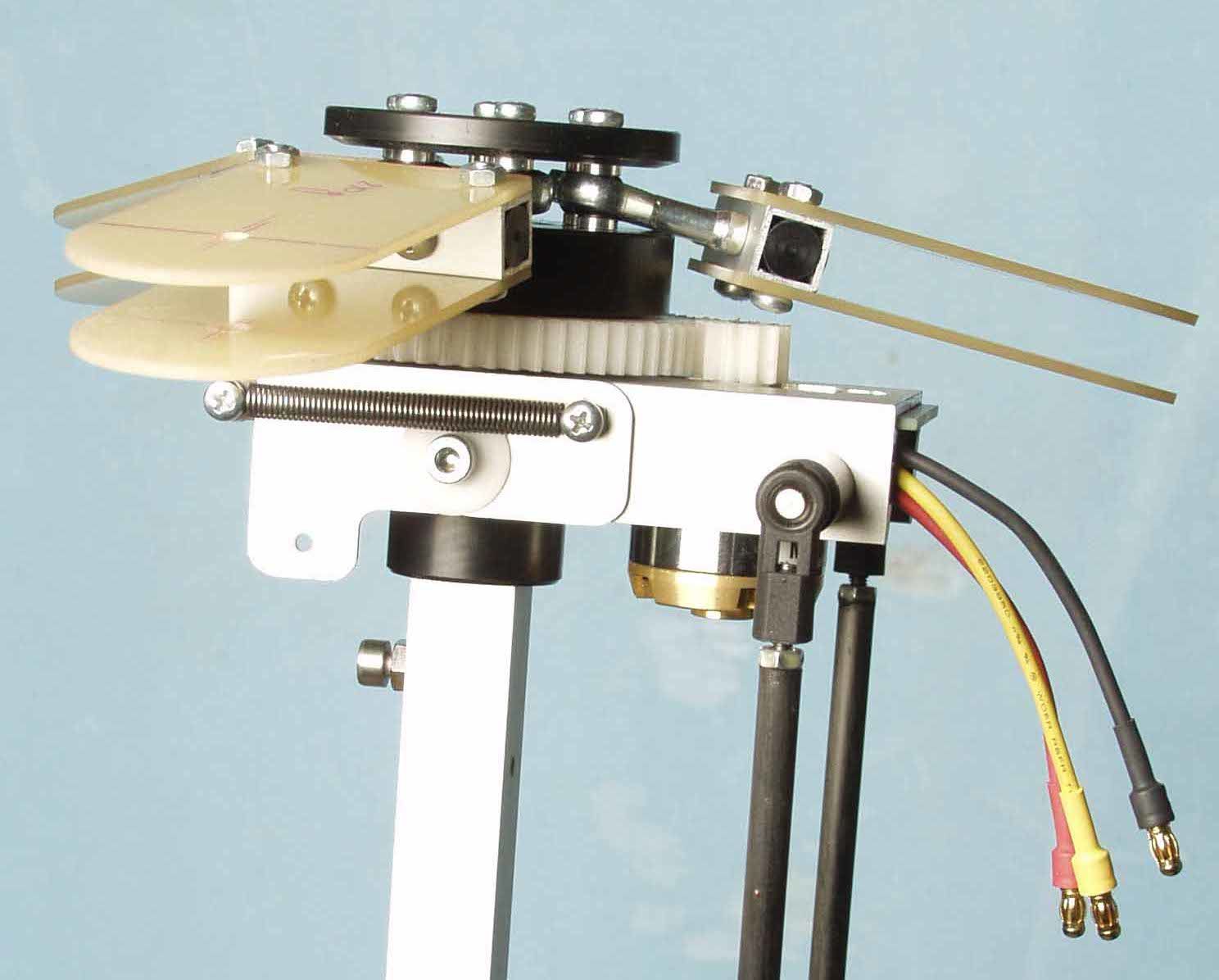
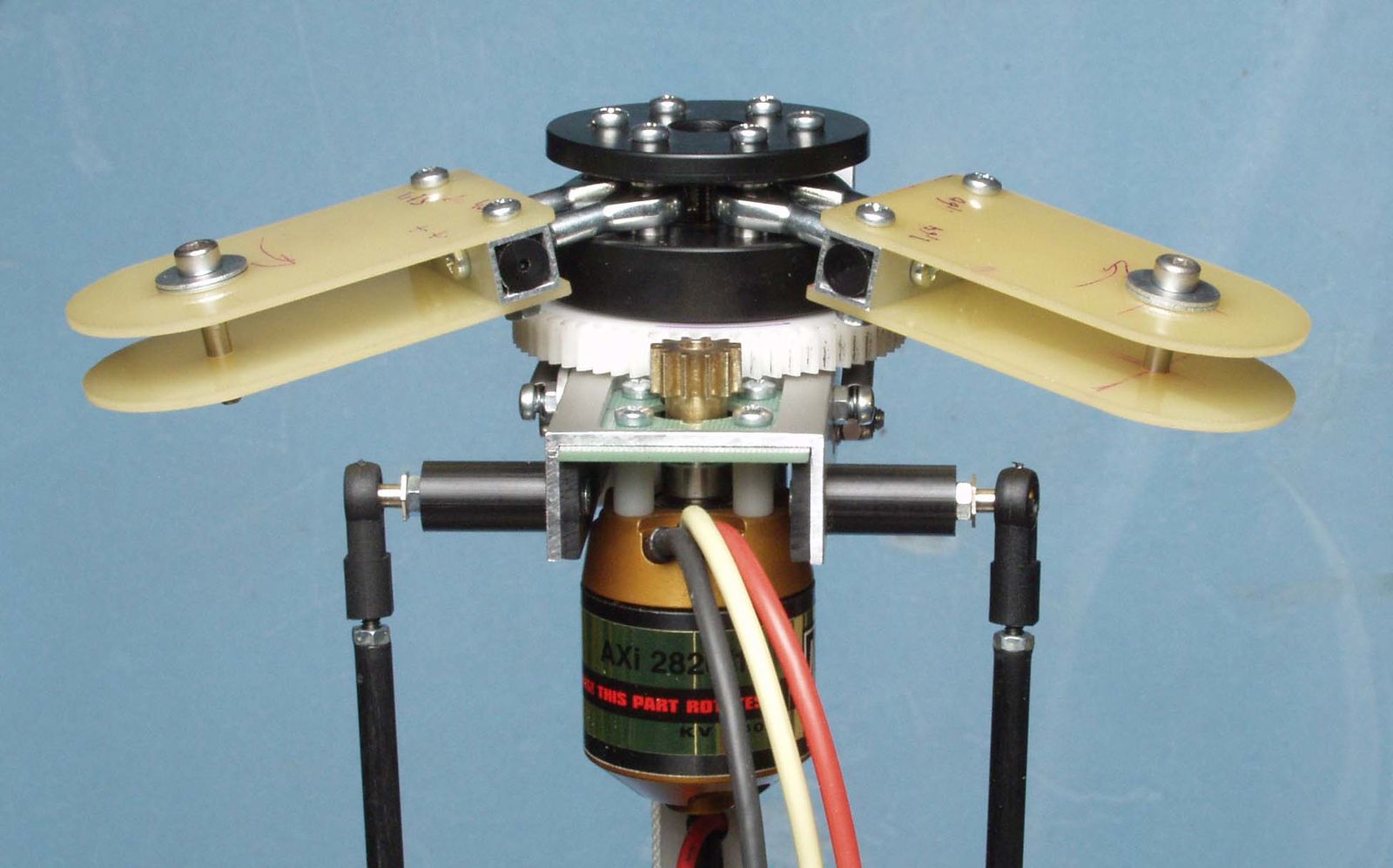
Voici une vue de l'ensemble de la pièce porte rotor, on y voit : l'axe rotor , le loquet de blocage, le pignon 12 dents en Delrin, le moteur brushless, un des 2 ressorts de rappel. Ne sachant pas encore le placement exact de mes servos de commande, j'ai provisoirement monté des biellettes courtes afin de pouvoir tester le bon fonctionnement de cette pièce intermédiaire. L'axe de ces biellettes se trouvent à une distance de 50mm de l'axe de pivotement. Les deux biellettes sont elles aussi écartées de 50mm.
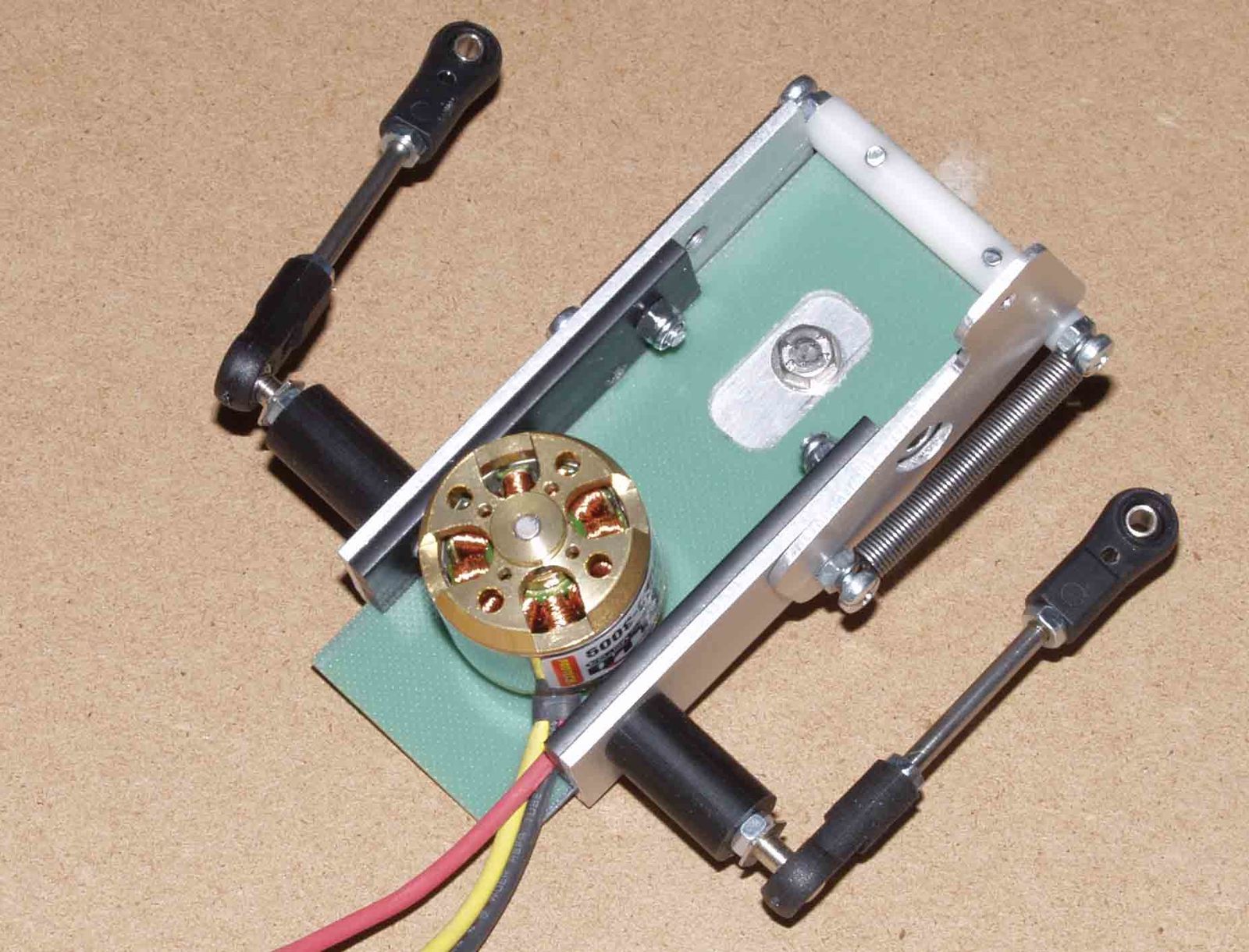
Comme chez nos très chères compagnes, les dessous ne sont pas non plus désagréables pour le plaisir des yeux, les couleurs s'accordent bien.!!!..non ?..Le moteur brushless de 200W est fixé sur une plaque époxy verte 1.5mm. Un évidement permet le passage de la vis de fixation M4 de l'axe du moyeu rotor . La glissière noire est en PVC, elle est fixée sur les deux côtés du profilé en U.....ça coulisse impeccable. A l'extrémité droite de la plaque d'époxy est fixé un axe blanc sur lequel s'accrochent les ressorts de rappel. Cet axe vient en butée arrière sur le profilé en U grâce aux deux ressorts de rappel. Le loquet quant à lui permet de positionner très exactement les roues dentées entre elles. A la fixation du ressort, sous le loquet, monté sur l'axe et ceci coaxialement à la vis de fixation, se trouve une rondelle en Delrin, peu visible sur la photo, dont le diamètre positionne très judicieusement la prise des engrenages. Cette petite rondelle peut être changée très facilement et cela évite de modifier le loquet pour des engrenages à rapport de démultiplication différent. C'est une superbe astuce....surtout pour des fainéants comme moi.
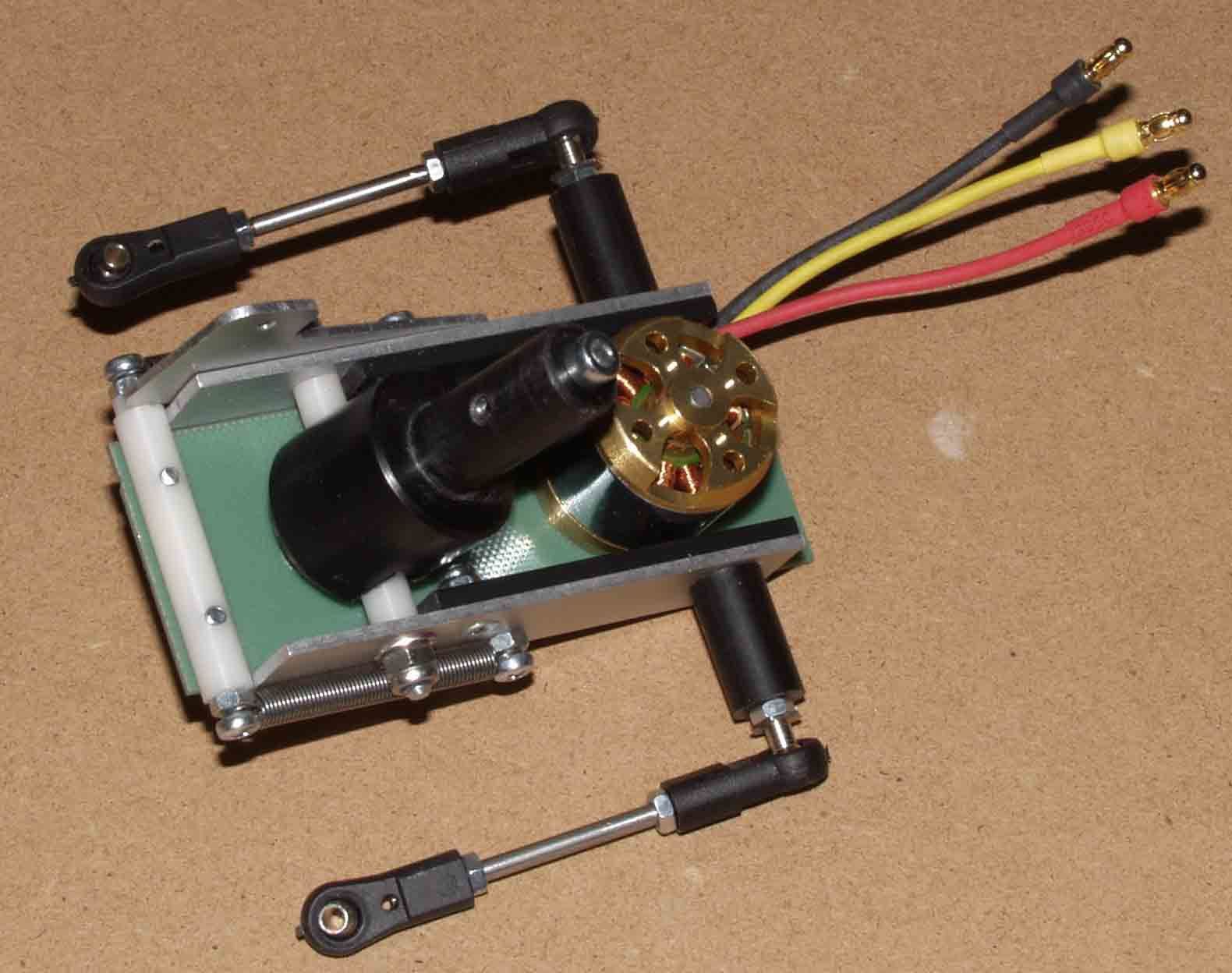
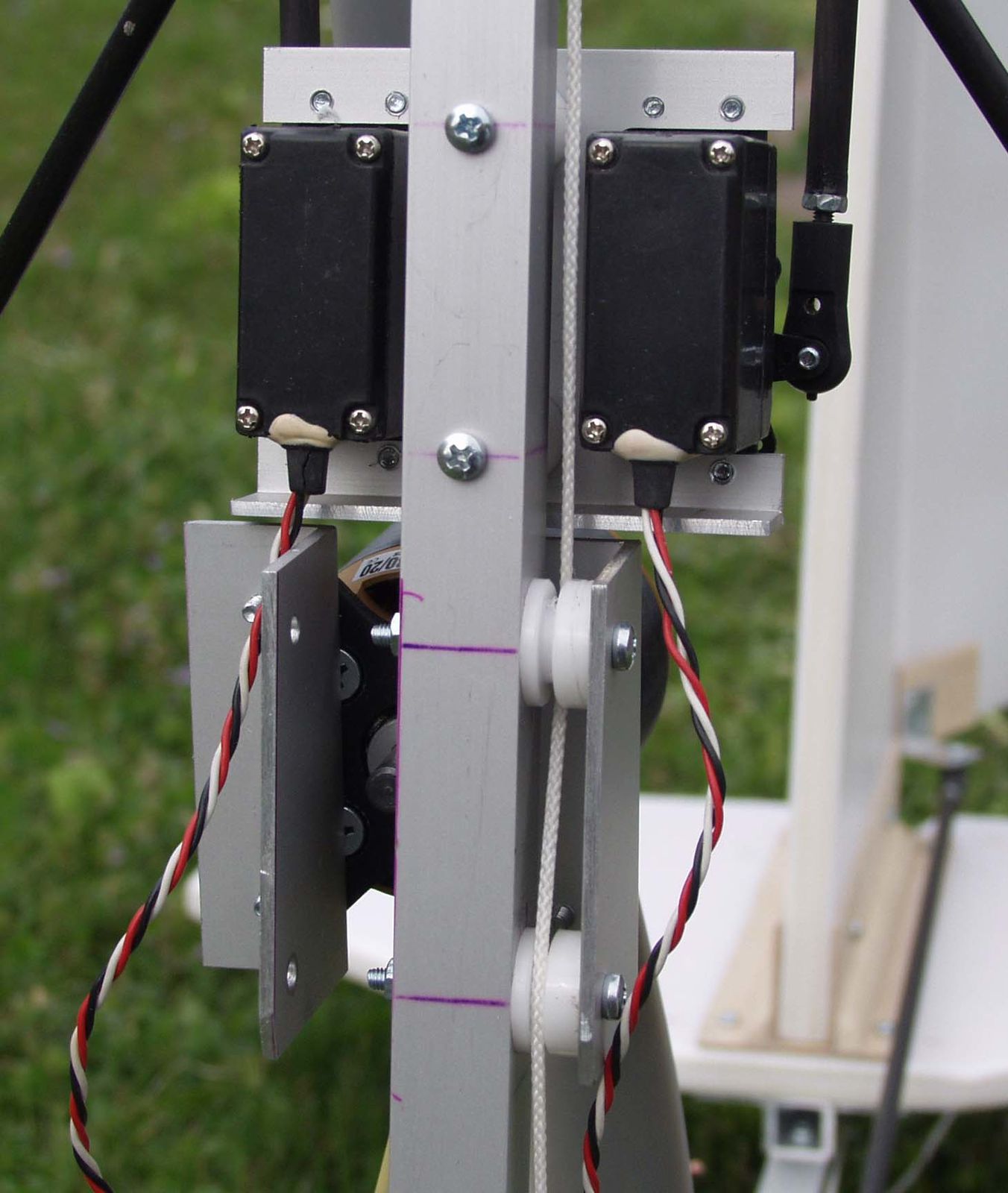
Cette vue montre la pièce intermédiaire montée complète avec son axe de pivotement qui lui viendra se placer dans un profilé creux en aluminium anodisé 15x15x1mm. Ce dernier constituera le mât de notre BR01 sur lequel les servos de commande du rotor complet se fixeront. Les biellettes de cette photo sont courtes ......c'est juste pour la photo.
Voilà une bonne partie de notre autogire de faite. Je ne sais pas ce que les visiteurs de mon blog en pensent. Si certains ont des suggestions à formuler ils le peuvent sous la rubrique commentaires. Quel sera le programme des prochains jours ? Le châssis sans aucun doute, comme le poids de notre BR01 est primordial, des matériaux légers sont recommandables. Il faut penser 360º... avant de commencer les découpes. Dans mon atelier traînent des anciennes flèches en carbone, du temps ou je faisais de la compétition de tir à l'arc. Rien ne se perd, rien ne se crée, tout se transforme. Ces flèches vont donc me servir comme on peut s'en douter pour le futur châssis, mariées avec de l'aluminium anodisé gris ça va faire joli. Si si, c'est important le mariage des couleurs, toujours pour le plaisir des yeux. Pour ceux qui s'intéressent à l' anodisation de l'aluminium dans différentes couleurs, quand j'en aurai fini avec notre BR01 je veux bien partager mon expérience dans ce domaine...Mais bon, j'ai un de mes fils qui attend avec impatience que je continue la construction d'un kart cross maison ( moteur 600cc à 98CV ) commencé depuis l'été dernier. Comme je veux partager cette construction avec mon fils ce dernier étant dans une école d'ingénieur à 700km de notre domicile il n'y a que les vacances pour cela.
Là je suis en train de raconter ma vie, ce n'est pas le but de mon blog......le BR01 avant tout....à suivre

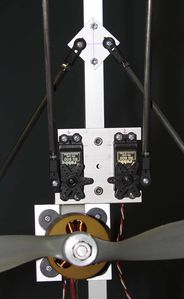
Voici le test... comment ça marche ? Pour amorcer la prise des engrenages il faut pousser le support moteur de pré-lancement époxy vert vers l' avant ( pousser à gauche sur la photo ). Il suffit alors de remonter le loquet qui se bloque automatiquement. Les engrenages sont en prise, le moteur peut actionner le rotor. Pour stopper le pré-lancement on tire le loquet vers le bas, les ressorts de rappel désengagent les roues dentées. Avec la télécommande on coupe le moteur. Comment peut on commander le loquet ? Il y a deux solutions, soit par un servo, soit par une légère inclinaison du rotor. Dans ce cas précis le loquet sera attaché par une petite ficelle au mât . En inclinant très légèrement le rotor en arrière, la ficelle tire d' elle-même le loquet.. simple non ? Je préfère cette solution, ça fait un servo de moins et du poids aussi. Je n'ai pas encore testé cette solution avec la ficelle mais le mécanisme du loquet fonctionne à merveille.... je suis fier de moi, je fais de l'autosatisfaction !!! j'ai le droit non ?
PS: les servos sont montés au haut du mât pour le test et surtout pour la photo..... à demain, si le coeur vous en dit.
Lundi 23 Mars 2009
J'ai passé quelques heures dans mon atelier, le châssis du BR01 prend forme. Les flèches en carbone remplissent très bien leurs fonctions, comme quoi il ne faut pas jeter, sans penser que ça puisse encore servir. Le mât principal est incliné de 7º vers l'arrière, le montage du rotor n' a posé aucun problème. Une vis de 4 assure la fixation dans le profilé anodisé 15x15x1. La longueur du mât reste dans des proportions telles qu'il respecte une harmonie flatteuse du BR01.Cela ne veux pas dire qu'un ajustement de sa longueur ne soit pas nécessaire. Il y a tellement d'éléments qui interviennent mais il faut bien commencer par un bout. Le positionnement des servos (en fonction Delta) est déterminé, juste au-dessus du moteur principal. Les biellettes en carbone ( toujours mes flèches ) qui commandent le rotor sont cette fois ci plus longues soit 33 cm. La position du moteur sur le mât dépend de l'hélice choisie. Pour l'instant je pense qu'une APC-E 16x10 devrait faire l'affaire mais par précaution je laisse de la place pour pouvoir monter éventuellement une hélice de 17 pouces.
Je viens de quitter mon atelier, les biellettes collent à l' Araldit...... j' explique. Les flèches en carbone sont creuses au diamètre de 4, les rotules en plastique ont un filetage de 3, donc pour assembler tout ça, j'ai coupé sur une tige filetée de 4 des petits bouts de 34mm. Sur une extrémité de ces bouts coupés et sur une longueur de 12mm j'ai tourné à 3 et fileté à 3. Un écrou de 3 est vissé à fond et forme une butée. Avec de l'Araldit sur le filetage restant de 4 je colle cette pièce à l'intérieur du tube en carbone. Cette opération est faite sur les deux extrémités du tube en carbone, les rotules en plastique se vissent sur le filetage de 3 on peut ainsi ajuster la longueur de plus ou moins 5mm.
Voilà pour aujourd'hui, demain je fais quelques photos c'est plus parlant.....@ plus.
Mardi 24 Mars 2009
Voici quelques photos du châssis en cours de montage
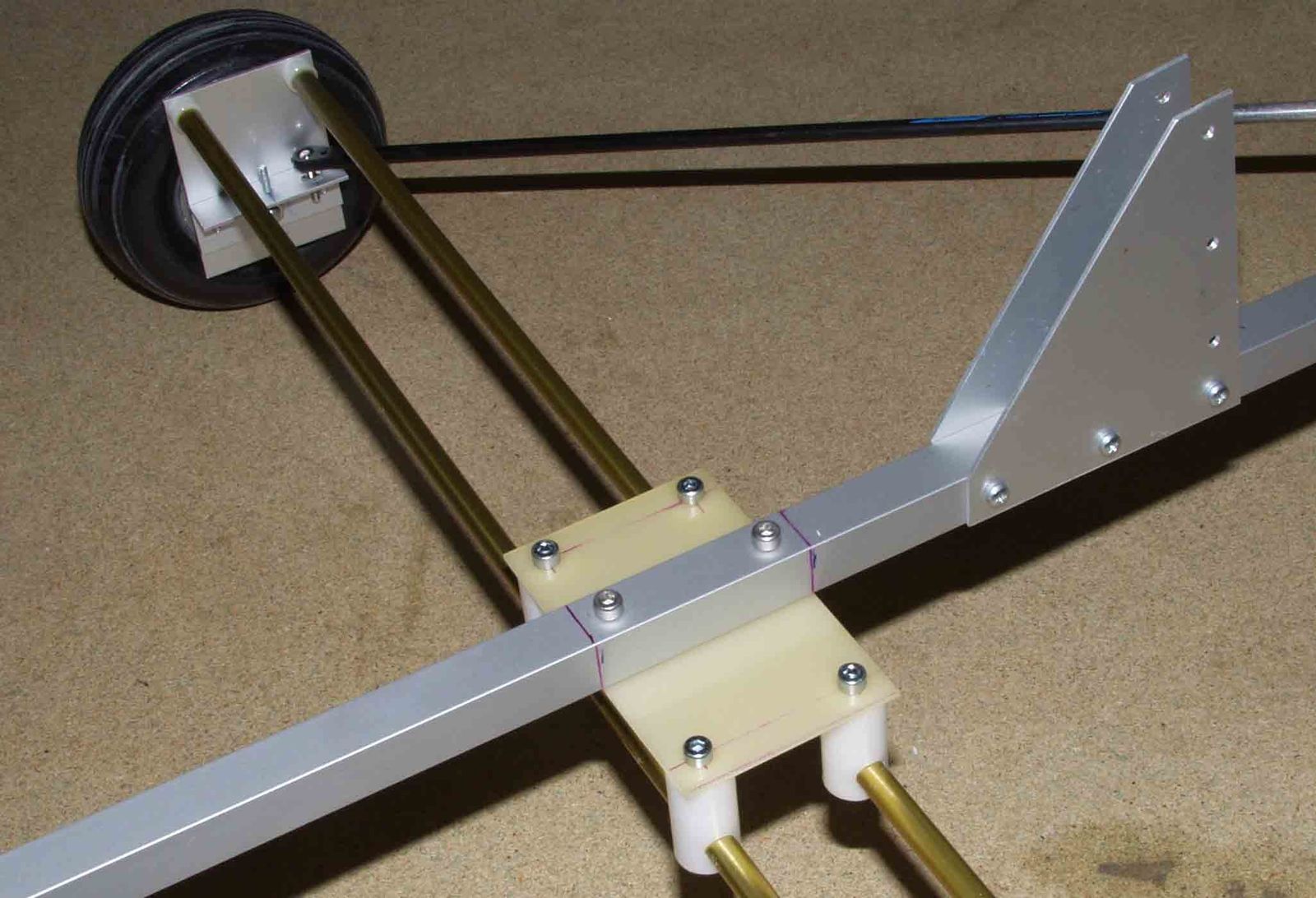
Les pièces dorées sont également des flèches mais en aluminium de 7mm de diamètre. Pour pouvoir fixer le support des roues j'ai réalisé des petites pièces en Delrin blanc qui s'emboîtent dans les tubes. Elles sont collées à l' Araldit et percées d'un trou fileté M3. Les roues arrières sont écartées de 70cm, elles forment un triangle équilatéral avec la roue avant directrice
Demain j' essaie de faire des photos du mât complet en extérieur ( si le temps le permet ), avec le flash il y a trop de reflets parasites.
Mercredi 25 Mars 2009
Il a plu toute la journée , les photos en extérieur ça sera pour plus tard. Le châssis s' étoffe de jour en jour, la fixation moteur est faite, les servos avec les biellettes sont montées. Pour éviter toute déception et frustration voici quand même une série de photos.

La vue des biellettes montre le montage des pièces filetées, collées à l'Araldit.
La fixation moteur est ajustable pour compenser l'anticouple un déplacement latéral de 25mm est possible.

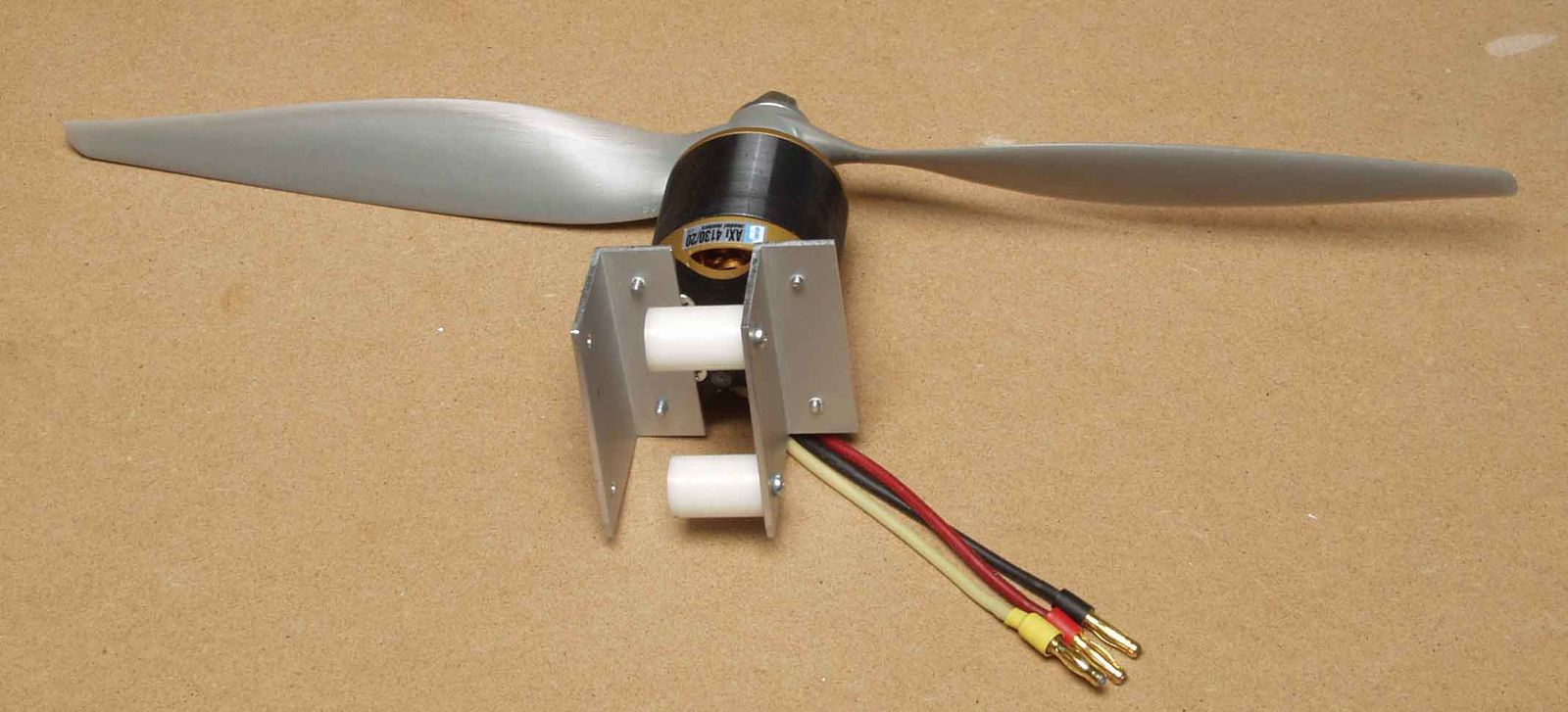
Vue du moteur AXI 4130/20 avec sa fixation ajustable en latéral.
Vue du rotor monté sur le mât avec ses biellettes de commande.
Le loquet est désactivé, les engrenages sont désengagés.
Le loquet est bloqué, les engrenages sont en prise.
Demain je pense passer mon temps à réaliser le mécanisme de la roue avant directrice. Des renforts en carbone sont absolument nécessaires pour donner plus de rigidité à l'ensemble mât, axe des roues.
J'aimerais déterminer la poussée de mon moteur AXI avec son hélice 16X10, alimentée sous 6 lipos de 3200 mA. Je dispose d'un banc d' essai qui m'indique la traction, la tension, l' ampérage ainsi que la vitesse de rotation.Tous ces paramètres me permettent de choisir telle ou telle hélice et me donnent une idée du temps de vol de l'autogire.
Jeudi 26 Mars 2009
Je sors de mon atelier, le mécanisme de la roue directrice est terminé, ça m'a pris plus de temps que je pensais. L'angle de chasse de la roue avant a fait varier la hauteur du châssis par rapport aux roues arrières, le problème est réglé.


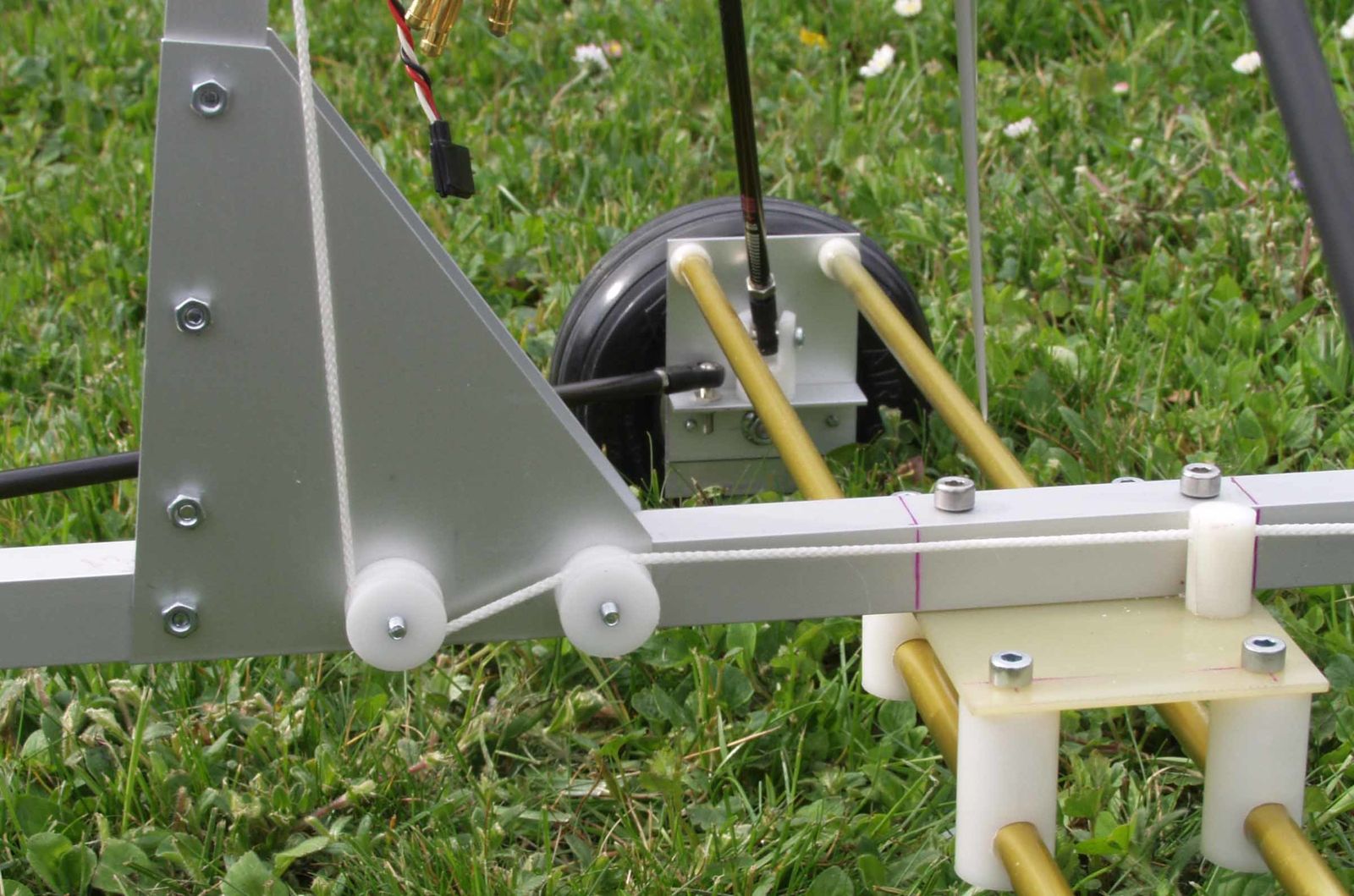
On devine la logique du montage, le châssis est percé à 8mm, la pièce noire est tournée à 8 également, sur une longueur de 10mm elle est filetée . La pièce vient se loger dans le trou du châssis, un écrou M8 fixe l'ensemble. Toujours dans la pièce noire, un trou de 5 mm laisse passer une vis M5 qui est l'axe de rotation de la roue avant. Une rondelle en Delrin blanc permet de régler le jeu fonctionnel grâce à l'écrou Nylstop M5.

Cette vue montre le montage du renfort du châssis, une biellette vient se fixer sur la pièce en Delrin blanc, l'autre extrémité se fixe sur le mât de l'autogire. C'est idem pour la seconde roue.
La fixation des renforts, roues - châssis, se trouve juste au-dessus des servos. Un réglage précis des biellettes permet d'ajuster le mât bien à la verticale, soit à 90º de l'axe des roues arrières.
Le châssis est pratiquement réalisé, maintenant il faut prévoir l'empennage horizontal et la dérive. Dans les jours prochains je vais m'activer dans ce sens. Le temps aujourd' hui ne m'a pas permis de faire une photo du châssis en extérieur comme je l'avais promis. Il ne faut pas perdre patience....demain est un autre jour.
Pour me consoler du temps pluvieux de cette journée, je me dis :
Il vaut mieux qu'il pleuve un jour comme aujourd' hui qu' un jour ou il fait beau..!!!!!! pensée philosophique à méditer.
Vendredi 27 Mars 2009
Le temps ne s'arrange pas, il fait gris, les nuages sont menaçants, c'est tout ce qu' il faut pour me rendre à l'atelier sans la moindre mauvaise conscience. Dehors il fait 8º, un vent à décorner les cocus......pour toutes ces raisons je m'y isole pour la journée. Les plus réactifs d'entre vous devinent que je n' habite pas dans le sud !! ...mais ça ne va pas tarder.
Avec tout ça, le projet avance lentement mais sûrement. Qu'ai je fait aujourd'hui ? ..tout d'abord je me suis attaqué à l'empennage, plus précisément la dérive ainsi que la fixation sur le châssis. Les preuves sont là, j'ai été flashé car je travaille trop vite....les photos sont indiscutables.
Cette partie, c'est la queue de l'autogire, la pièce suivante se fixe dessus par 4 vis.

Cette pièce en bois va tenir l'empennage et la dérive.

Pour ceux dont les neurones traînent à la détente, voici le résultat.

Sans commentairessss.....si si, c'est du Dépron, il y à 3 couches, Une partie ajourée en Dépron de 6mm est prise en sandwich par deux parties de 3mm. L 'oeil expert peut deviner sur la photo les découpes, la chasse aux grammes est ouverte !! De cette façon la rigidité de l'ensemble est accrue.

Une éclaircie dans un ciel couvert....vite la photo...Voici enfin une vue de notre BR01, on peut penser qu' il fait squelettique, pas de craintes, il va s'étoffer, prendre des rondeurs mais la balance reste intraitable, régime, régime, les beaux jours arrivent.
Voilà pour aujourd'hui, à demain.....si je ne vous lasse pas de trop.
La pensée du jour :
Plus tu pédales moins vite, moins tu avances plus vite !.......à méditer.
Dimanche 29 Mars 2009
Trop curieux de savoir la puissance de mon moteur AXI 4130/20, j'ai fait tourner mon banc d'essai.
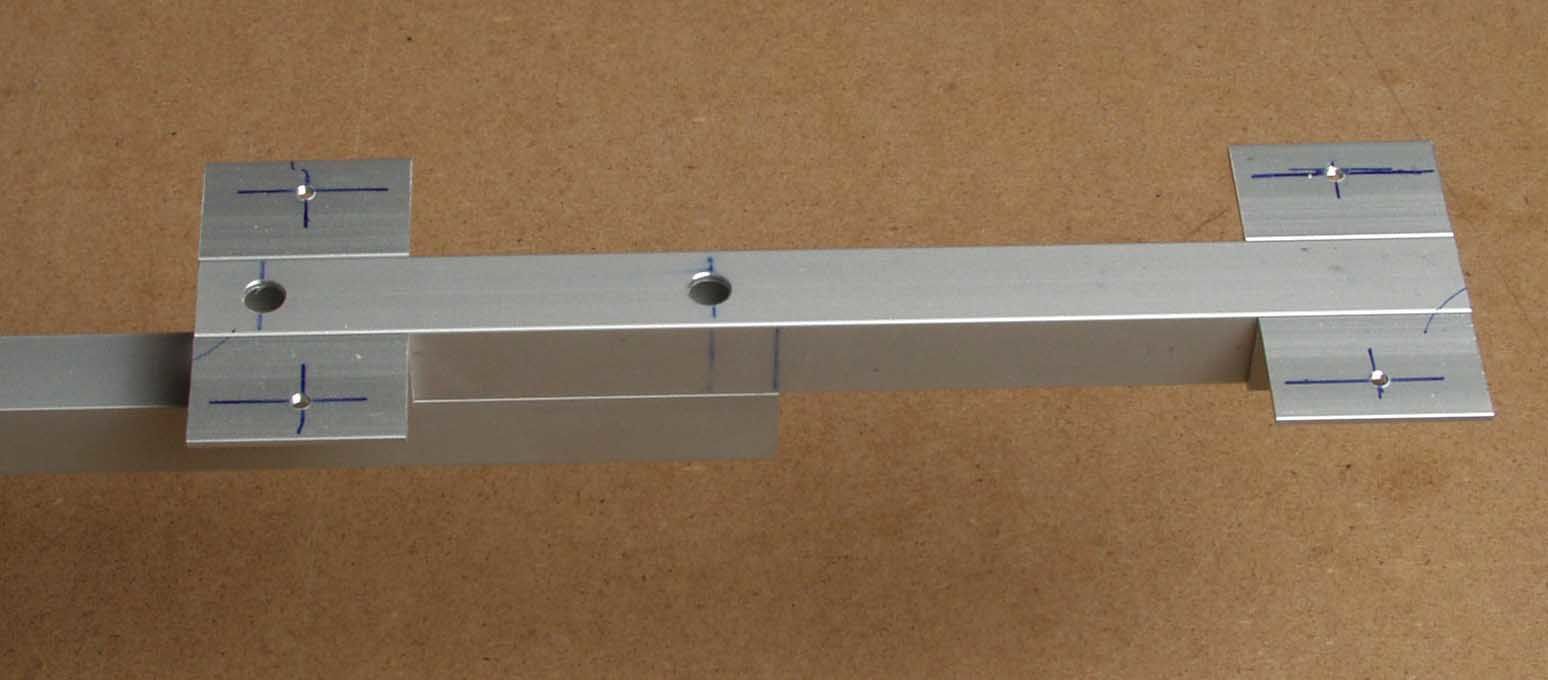
De quoi se compose-t-il ?. C'est relativement simple, profitant d'avoir dans mes réserves des roulements de guidage à billes j'ai réalisé un montage avec deux douilles à billes se déplaçant sur deux barres parallèles en acier inox . Le moteur est fixé solidement sur une planchette elle même attachée fermement sur ces roulements de guidage. Le moteur a donc toute liberté de se déplacer sur la longueur des deux barres. Ces dernières sont vissées aux deux extrémités sur une cornière en aluminium. Cet ensemble complet est fixé solidement sur le bord d'un panneau aggloméré afin de laisser libre le passage de l' hélice. Un crochet vissé sur la planchette au niveau de l'axe du moteur permet grâce à une cordelette de mesurer la force de traction moteur-hélice.
J' ai piqué dans la cuisine de ma femme sa fameuse balance de précision à affichage digital ...chut...fermez la porte , il ne faut rien dire. !! Cette balance précise à 5 g va m'indiquer la traction de mon moteur. Comment procéder ? C'est simple, sur cette balance posée au sol je place un bidon rempli d'eau pour qu' elle indique 4000g. Le bidon est attaché à la cordelette et via une poulie, fixé au crochet du moteur. Pour connaître les valeurs des mesures il faut juste savoir faire une soustraction, ce n'est pas trop demandé... Des 4000g on retire le poids indiqué par la balance et on obtient la traction de notre moteur...pour ceux au fond de la classe, aux neurones fatigués!! ..le moteur doit tourner au régime maxi et avec son hélice !!!.. c'est bien compris ?.
Voilà pour la traction moteur, mais il y d' autres paramètres qui sont intéressants à connaître, comme le courant en ampère, la tension en pleine charge, ainsi que le régime moteur. Avec tous ces paramètres on peut déterminer l'hélice la plus appropriée à notre autogire. Pour faire court, on choisira l' hélice qui consomme le moins de courant et qui donne le plus de traction. Avec la valeur du courant consommé et la capacité des accus branchés on peut calculer le temps de vol .Pour mesurer la tension c'est relativement facile, un multimètre fait l'affaire. En ce qui concerne les ampères c' est un autre problème, en effet les multimètres qui mesurent des courants de plus de 10A sont rares alors pour des valeurs de plus de 20A c' est mission impossible. Touchant un peu à l' électronique j' ai réalisé un appareil spécifique qui peut mesurer des courants jusqu' à 100A , avec affichage digital des valeurs. Le principe est de mesurer la tension aux bornes d'une résistance de puissance et de précision de 1 Ohm U=RI donc si R= 1 U=I. En réalité la résistance shunt est de 0.01 ohm la tension mesurée est à multiplier par 100 ce qui correspond à I le courant en ampère L'afficheur digital de la valeur prend en charge ce facteur multiplicateur..Pour déterminer le régime moteur j'utilise un petit tachymètre bon marché , acheté chez Conrad .
Voici quelques photos.
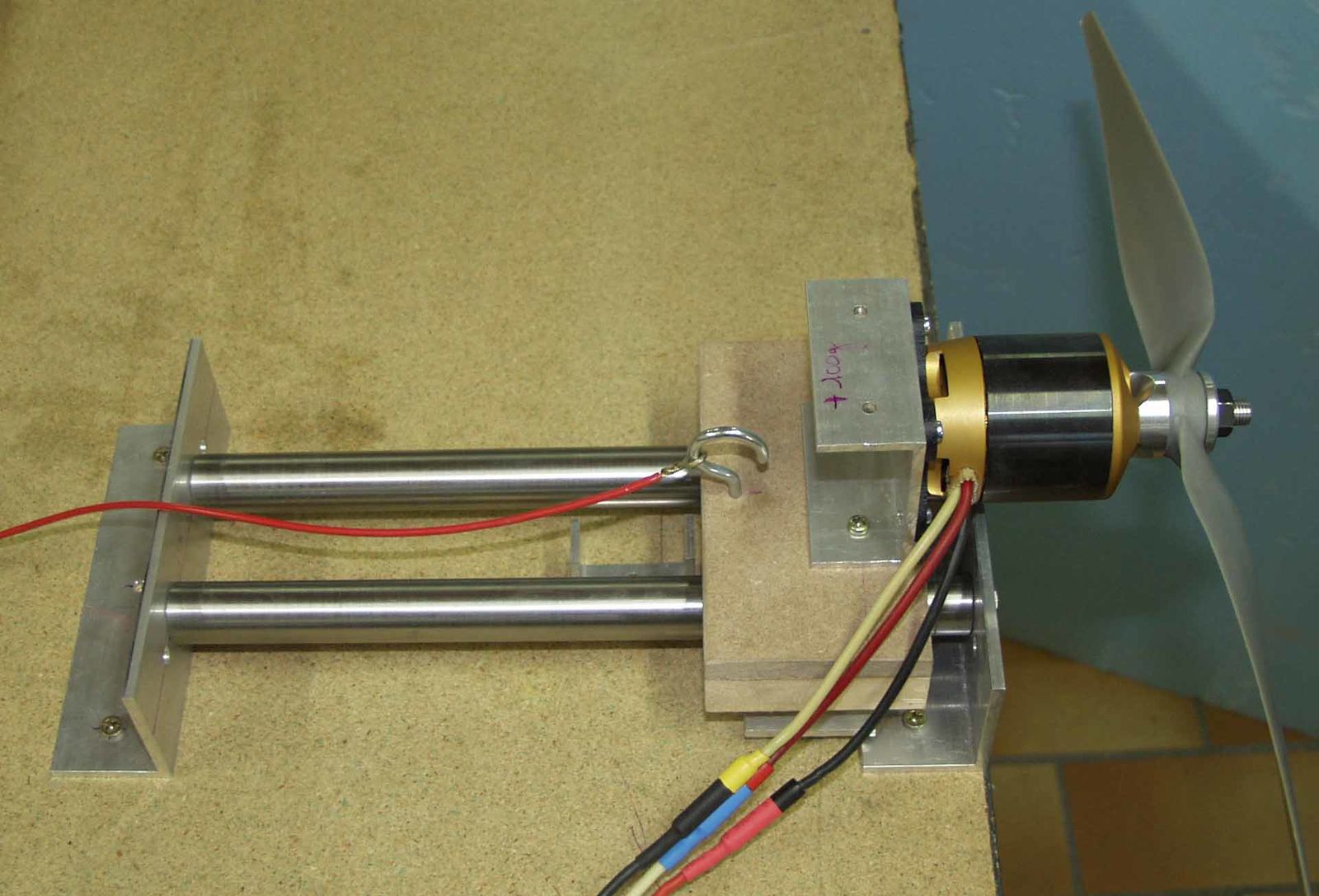
Voici le montage, c'est du solide..... made by Krupp. On peut remarquer entre les deux barres une petite pièce en aluminium qui limite le déplacement vers la gauche afin que l'hélice ne puisse toucher quoi que ce soit.
Une petite poulie est placée à l'autre extrémité du panneau, la cordelette transmet la force de traction à la balance.

C'est la balance de madame..!!.....le bidon est rempli d'eau, juste ce qu'il faut pour indiquer 4000g, valeur arbitraire facilitant le calcul mental mais devant être supérieure à la traction de notre moteur. TERRAILLON est une très bonne marque de balance.....un peu de pub pour les accros !!

Cette vue montre le tableau de bord de mon banc d'essai, on y voit : les accus 2 packs lipo à 3 éléments montés en série ( 3200 mA ), le tachymètre, le multimètre indiquant la tension en Volt , l' ampèremètre donnant le courant en Ampère, le récepteur et enfin l'accu d' alimentation 5V. L'ampèremètre est le seul appareil branché au secteur.
J'ai effectué des mesures avec deux sortes d'hélice, une APC-E 10x16 ainsi qu' une hélice tripales Graupner 14x7.
Voici les résultats :
APC-E 10x16 6 lipos 24.4 V Graupner tripales 14x7 6 lipos 24.4 V
Courant 23.3 A Courant 19.4 A
Tension 20.7 V Tension 21.3 V
Traction 2550 g Traction 2330 g
Régime 5250 t/mn Régime 5550 t/mn
Puissance 482 W Puissance 413 W
Mon but est d'obtenir une poussée moteur de 3000g minimum, pour ce faire je pense qu' une hélice tripales 16x10 doit faire l'affaire mais c'est à vérifier. J 'avais indiqué dans mon texte que l' on pouvait calculer avec ces paramètres la durée de vol maximum de notre RB01. Le calcul est simple, mes accus ont une capacité de 3200mA en voici donc la formule.
60min X 3.2 A = Ymin X Courant mesuré soit Ymin = 60 X 3.2 / courant mesuré
APC-E 60 X 3.2 / 23.3 = 8.24 min Graupner 14X7 60 X 3.2 / 19.4 = 9.89 min
Vu les résultats, je vais commander une hélice tripale 16X10 Sonic chez Graupner et effectuer les mêmes mesures. Si je n'arrive pas au but escompté, c'est à dire 3 Kg de traction, je pense ajouter un 3
ème pack lipo en série, la tension sera donc supérieure et de fait le régime tr/min également.
Voilà pour ce dimanche, je n'oublie pas la pensée philosophique du jour :
" C'est un genre de couteau, sans manche et sans lame.....à méditer. @ plus.
Lundi 30 Mars 2009
Bonjour à tous, avant de vous donner le programme de ma journée, j' aimerais remercier tout particulièrement les personnes qui sur les forum de modélisme suivent avec attention la progression de la construction de l'autogire BR01. Les mots qui me sont adressés me vont droit au coeur, merci à vous, ça m'encourage à un tel point, comme dit Monsieur Kronenbourg , que je me mets la pression !! afin de satisfaire votre curiosité.
Maintenant que les remerciements sont formulés cela ne vous autorise en aucun cas à ne plus me booster par vos paroles si gentilles..!!!
Revenons à nos moutons, j'ai passé ma journée à terminer l'empennage, il est monté, l' autogire prend de la gueule. Je n'ai pas trouvé dans mon bazar une petite roue qui puisse me satisfaire, solution au problème, on la fait.
Dans une chute de Delrin j' ai tourné une roue au diamètre de 40, montée à l'arrière elle va servir de protection dans le cas d'un atterrissage scabreux . Pour gagner du poids, la roue est ajourée par 6 trous de 6mm, elle sera fixée au châssis par une corde à piano ce qui donnera un montage souple.
Dans la deuxième partie de la journée j'ai fait des essais moteur monté, avec l'hélice 16X10, afin d'ajuster le positionnement latéral de l'AXI 4130/20 dans le but d' avoir un autogire qui se dirige droit devant . Cette opération est minutieuse, vu de l'arrière, j' ai du décaler le moteur vers la droite de 11mm par rapport à l'axe du mât. Je n'ai pas trop insisté du fait que cette hélice ne sera pas l'hélice définitive de l'autogire. Comme le moteur est décalé par rapport à l'axe du mât central, il faudra compenser avec d'autres éléments pour obtenir une verticalité parfaite du mât. Ces essais ont été réalisés à une pression atmosphérique de 1038 hPa, un degré d'humidité de 74% une température de 20.8º au sol et surtout..... l'autogire suspendu par l'axe du rotor.!!!
Je n' ai pas fait de photos cette fois ci, mais demain peut être. Je viens de me rendre compte que je n'ai pas encore divulgué les dimensions de la bête. Donc, à l'aide de mon double décamètre !! voici les mensurations. Madame Geneviève de Fontenay va en perdre sa verve !!!
Longueur hors tout 1250 mm
Hauteur hors tout 825 mm
Le poids........??? NC......comme le BR01 n'est pas complètement monté, prêt à voler, le poids qui s'affiche sur la balance n'est pas la valeur exacte. Mais bon, à la pesée il faut ajouter le poids des 3 pales( environ 220g ), le câblage, un servo, un contrôleur, et quelques bricoles, ce qui me dit que nous restons dans les limites du poids fixé. Pour le moment le bébé affiche un poids de 2730 g l'accouchement s'est bien passé et les parents rayonnent de bonheur.
Encore une journée de plus en moins !! .....n'oublions pas notre pensée philosophique :
On dit pull-over... parce qu' un pull sans ovaires est un tricot stérile !!.........à méditer. @ plus.
Mardi 31 Mars 2009
Comme promis hier, voici la photo la plus récente de l'autogire BR01. Aujourd' hui je n'ai pas fait grand chose qui puisse faire avancer à grands pas la construction. Il fait beau dehors, les travaux dans le jardin sont plus que nécessaires. Oui, il y a des priorités même si mon moi profond penche plus vers l'atelier que le jardin. J' ai fait deux photos et positionné un servo pour la direction de la roue avant, voilà c'est tout.

C' est la petite roue arrière que j'ai réalisée au tour, il manque le perçage de l'axe. Il est possible de faire une gorge et d' y placer un joint torique on aura de ce fait l'impression d'avoir une jante et un pneu..

Il ne manque plus grand chose, à ce stade la construction est presque achevée. Il reste à positionner et fixer les accus, le récepteur, la commande de la dérive, les contrôleurs, et pour finir monter les 3 pales. Ensuite il y a bien sûr les réglages à fignoler, le centre de gravité à optimiser et surtout le centrage à parfaire.
Il y a encore quelques heures de travail....mais pour suivre l'évolution de notre autogire il va falloir patienter un peu.!!
Je vous prie de m'excuser pour ce contre temps mais moi aussi j'ai droit à des vacances. Pour être clair, je serai loin de mon atelier pendant toute la période de Pâques. Je vais me ressourcer en Ardèche, le départ c'est pour demain, je pense être de retour pour le 16 Avril avec beaucoup de nouvelles idées. Ne croyez pas que je vais glander en Ardèche, ni compter mes chèvres, le boulot est présent partout, mais là c'est la maçonnerie qui m'attend. Je vous avais informé qu'un départ vers le sud était fortement envisagé, mais pas avant d'avoir construit une petite dépendance de 50 m2 qui est destinée à mon nouvel ATELIER. Comme j'effectue moi même tous ces travaux ça risque de prendre un peu de temps.
Chers lecteurs passionnés de modélisme, je vous souhaite à tous de bonnes fêtes de Pâques, soyez créatifs .
Une pensée philosophique pour les vacances :
On dit de l'éléphant qu' il a de la mémoire, c'est parce qu'il a longtemps été trompé avec défense d' y voir clair !!
Une autre..si..si
C'est à force de regarder la scie...... que Léonard de Vinci
La dernière.....allez...un petit exercice de diction :
La pipe au papa du pape Pie pue.
Tes laitues naissent elles, yes mes laitues naissent.
@plus......les vacances, ce n'est pas un poisson d' Avril.
Jeudi 16 Avril 2009
J 'ai tenu ma promesse, les congés c'est du passé, alors au boulot. En deux semaines d' absence le jardin ne m'a pas attendu, l' herbe est haute, je dois donc impérativement sortir la tondeuse de son long repos hivernal, sinon maman va me regarder ....je vous laisse deviner.
Le BR01 m'attend sagement dans l' atelier avec l'air de dire, quand est ce que tu t' occupes de moi. A peine arrivé je dois être au four et au moulin, promis, dès que l' herbe du jardin est coupée je fais tourner les machines.
Pour l'alimentation du moteur pré-lanceur brushless une solution m' est venue à l'esprit . Pomper des électrons sur les accus embarqués ça me fait perdre de l 'autonomie. Il est donc préférable d'alimenter ce moteur avec un accu au sol. Un système simple coupera le courant moteur tout en libérant dans le même instant le loquet. Cette manoeuvre sera exécutée automatiquement au moment de donner les gaz. De cette manière la capacité des accus embarqués sera destinée exclusivement au moteur AXI 4130/20. Un problème se présente, le contrôleur de ce moteur n'a pas de prise BEC, pour éviter une surcharge de poids par des accus séparés pour le récepteur et les servos, la réalisation d'une alimentation régulée de 6 V est nécessaire . On fera un peu d' électronique, un composant régulateur de tension 6V va nous faciliter la tâche. Voici donc quelques idées, mais je ne veux pas m' éparpiller dans toutes les directions, pour l'instant la priorité reste toujours le montage de notre autogire.
Vendredi 17 Avril 2009
Le gazon c'est fait....occupons nous maintenant de notre autogire. Aujourd'hui j'ai positionné le servo qui commande la dérive et fait des essais de déclenchement automatique du loquet. Une cordelette accrochée au loquet longe le mât central et via des guides se dirige vers la queue de notre BR01. La mesure m' indique qu'une traction de 210g sur la cordelette déclenche le loquet et de ce fait désengage le moteur pré-lanceur. Voilà une partie de faite, dans le même esprit les deux câbles d'alimentation du contrôleur (moteur pré-lanceur ) vont se terminer en queue également. A présent il va falloir inventer un système d'alimentation qui se désolidarise des câbles au même instant que le loquet mais seulement à une traction supérieure, environ 350g, ceci pour respecter un ordre de fonctionnement , le loquet puis l'alimentation. Il est clair que cette traction c'est notre moteur principal qui s'en charge. Il est possible également de réduire les différentes forces de traction par l'ajout de petits ressorts qui tirent dans le même sans, ou profiter de l'énergie cinétique de notre autogire en mouvement. Des essais sont nécessaires....le BR01 est un prototype !!
Il est important de peaufiner ce mécanisme, et c'est seulement après des essais concluants que je vais pouvoir placer les accus, les contrôleurs, le récepteur, etc . Il faut garder à l'esprit que ces éléments sont à positionner de telle sorte que le centrage de l'autogire soit correct et surtout que le centre de gravité soit le plus proche de l'axe de poussée du moteur AXI 4130/20 .
Pour mieux comprendre ces explications demain je vais faire quelques photos.
@ plus.... si le coeur vous en dit
Samedi 18 Avril 2009

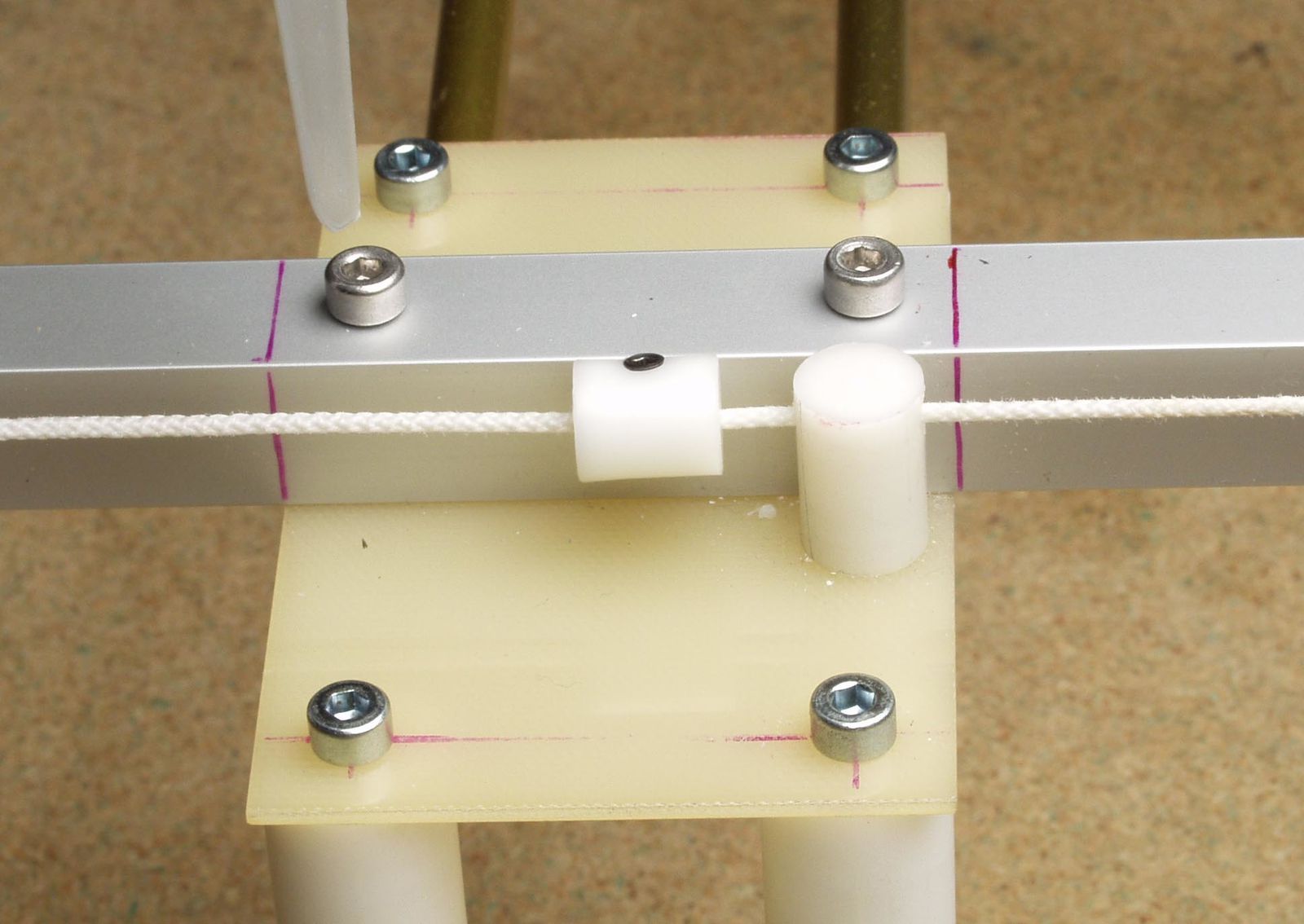
La cordelette est fixée au loquet, une traction vers le bas désengage les engrenages
La cordelette longe le mât et est guidée par les entretoises de positionnement latéral du moteur.
Pour éviter que l'hélice puisse toucher la cordelette, celle-ci passe par un trou de 3mm dans la petite pièce à droite

.
Voici à quoi va ressembler notre alimentation régulée de 6V. La tension va être prise sur un des accus lipo 3S soit 11.1V. Le régulateur 6V ne permet qu'un courant de 1A. la solution est toute trouvée, 3 régulateurs montés en parallèle vont, par mesure de précaution, autoriser un courant maxi de 3A. Pour éviter que les régulateurs chauffent de trop, un montage avec deux diodes à l'entrée du circuit va faire chuter la tension de 1.4V. La différence de tension 11.1V - 6V = 5.1V va être diminuée à 5.1V - 1.4V = 3.7V .Par la même occasion une erreur de branchement ne peut plus détruire le montage. Ce que je vais prévoir également c'est une Led verte indiquant que la tension de 6V est disponible. Je ne connais pas très exactement la consommation en courant de mes 4 servos mais à mon avis 1 A devrait être un grand maximum. Des essais avec les pales montées et en mouvement sont indispensables pour mesurer le courant consommé.
Voilà pour aujourd' hui, demain est un autre jour. Avant de vous quitter une pensée philosophique :
Ce n' est pas, parce que l' homme a soif d'amour, qu' il doit sauter sur la première gourde......... à méditer..!!!
Lundi 20 Avril 2009
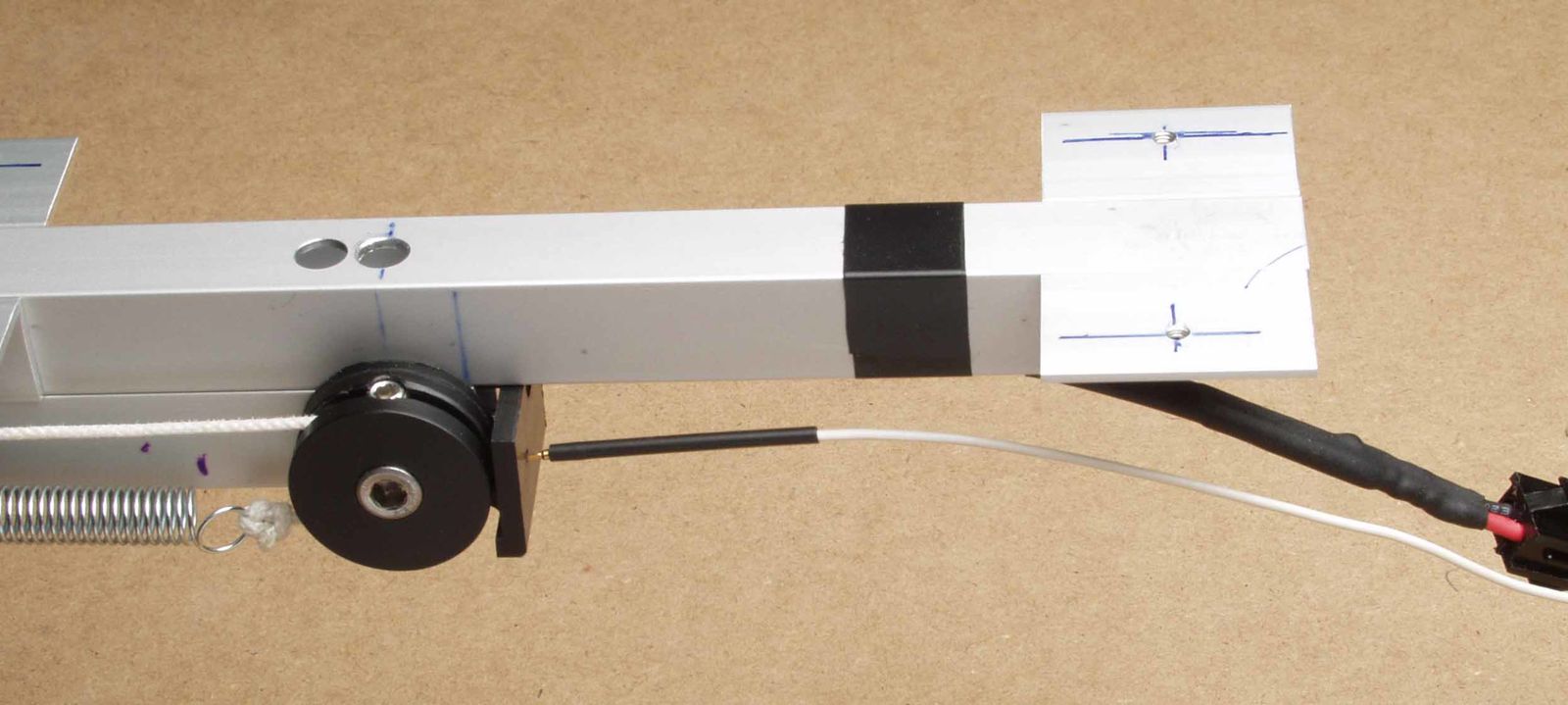
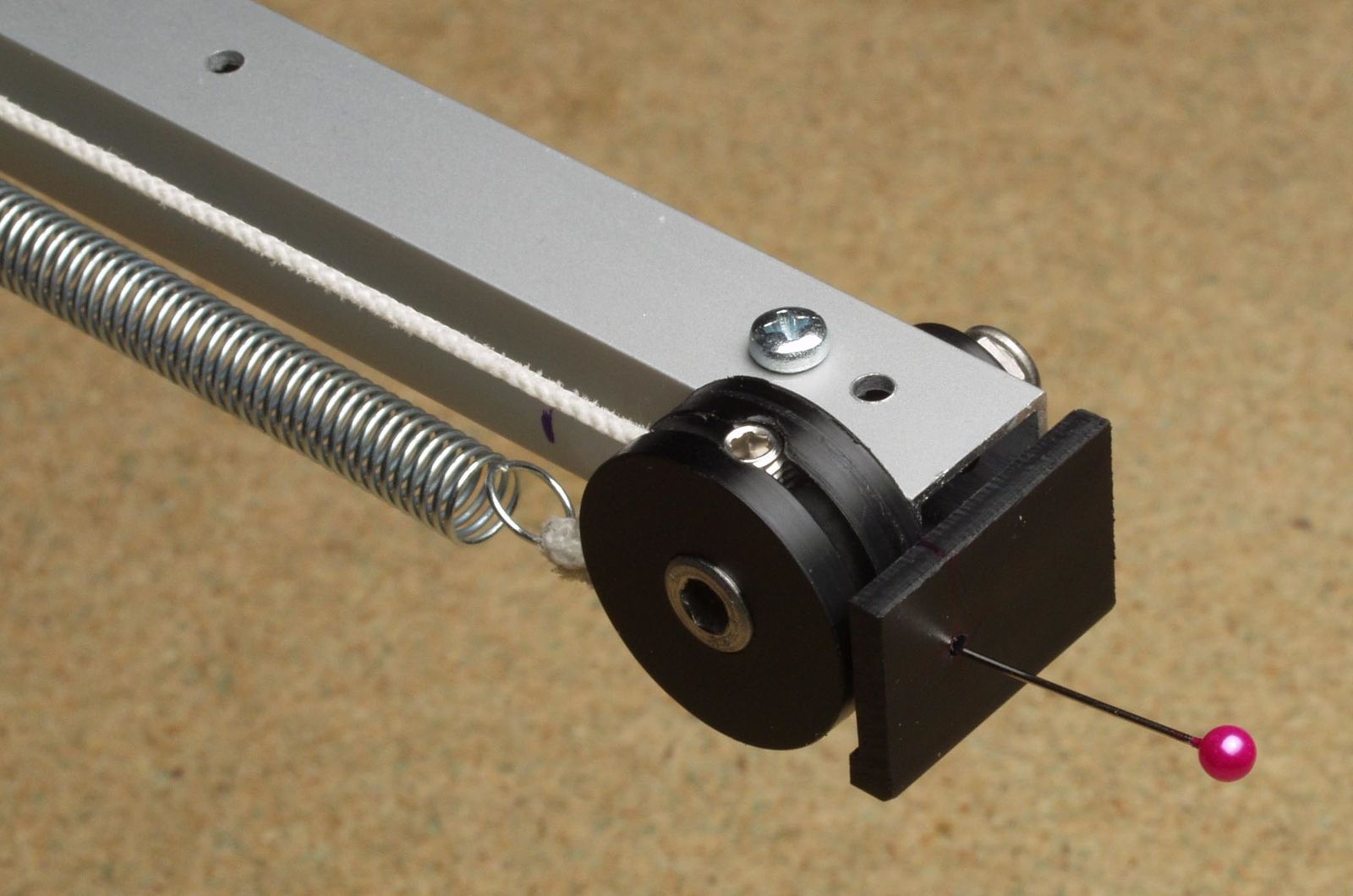
J 'ai passé ma journée à développer le mécanisme à débloquer le loquet, ce n' était pas une partie de plaisir mais avec de l' obstination on y arrive. Le principe est le suivant : à l'arrière de l'autogire, sous l' empennage la cordelette passe dans la gorge d'une petite poulie et est tendue par un ressort. Elle est fixée dans la gorge de la poulie par une vis M5 de telle manière que celle-ci est entraînée en rotation . Une pièce en PVC est ajustée de façon à prendre appui sur le diamètre extérieur de la poulie. Un petit trou de 1.5mm est percé à travers la pièce en PVC, puis la poulie sur une profondeur de 10mm, perpendiculaire à son axe .

La photo montre la poulie avec son axe ( vis M5 ) et la vis de blocage de la cordelette au fond de la gorge. La pièce à droite se loge dans le profilé carré en aluminium et sert de guide à l'axe. En haut c'est la fameuse pièce en PVC.
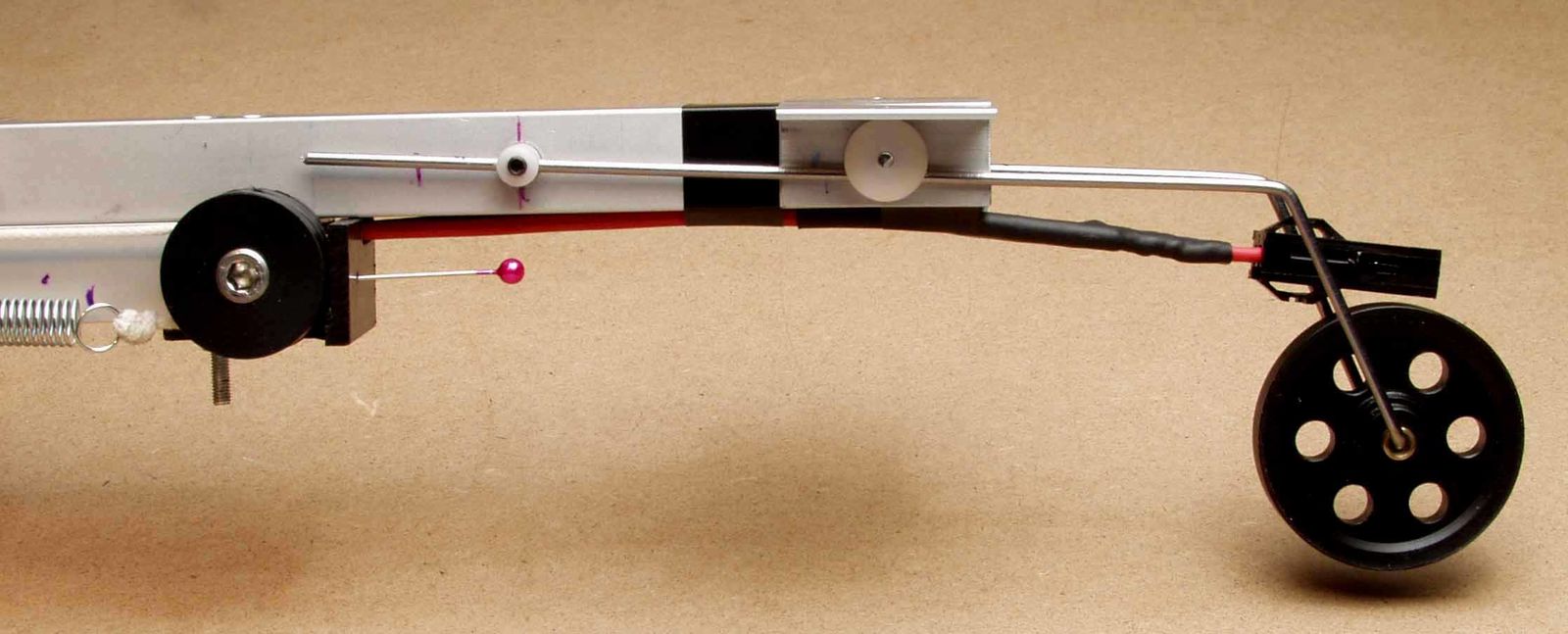
L'ensemble est monté en position engrenages en prise, c'est à dire que le loquet est en position haute, le moteur pré-lanceur fait tourner le rotor. Dans le trou de 1.5mm une aiguille bloque en rotation la poulie. Le retrait de l'aiguille débloque la poulie, le ressort tendu tire la cordelette qui elle tire le loquet, le moteur pré-lanceur libère le rotor qui tourne maintenant librement. Vu la longueur de la cordelette l'ajustement est fastidieux du fait de l'élasticité de celle ci. De plus, le loquet débloqué, la cordelette ne doit être en aucun cas en tension, un jeu fonctionnel est primordial. N'oublions pas que le rotor est inclinable d'avant en arrière et de gauche à droite.
Comme le ressort est en traction constante cette petite pièce centrale limite le déplacement de la cordelette en venant en butée sur le guide. Cette vue montre la position 1, loquet haut, le rotor est entraîné.

L'aiguille est retirée, le ressort tire sur la cordelette, le loquet est en position basse, le rotor tourne librement. C 'est la position 2, la pièce centrale est en butée, à droite la cordelette est tendue, à gauche la cordelette donne du mou. Comme le loquet est en position basse sans aucune tension avec un jeu fonctionnel suffisant, le rotor est libre de ses déplacements.

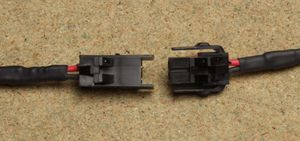
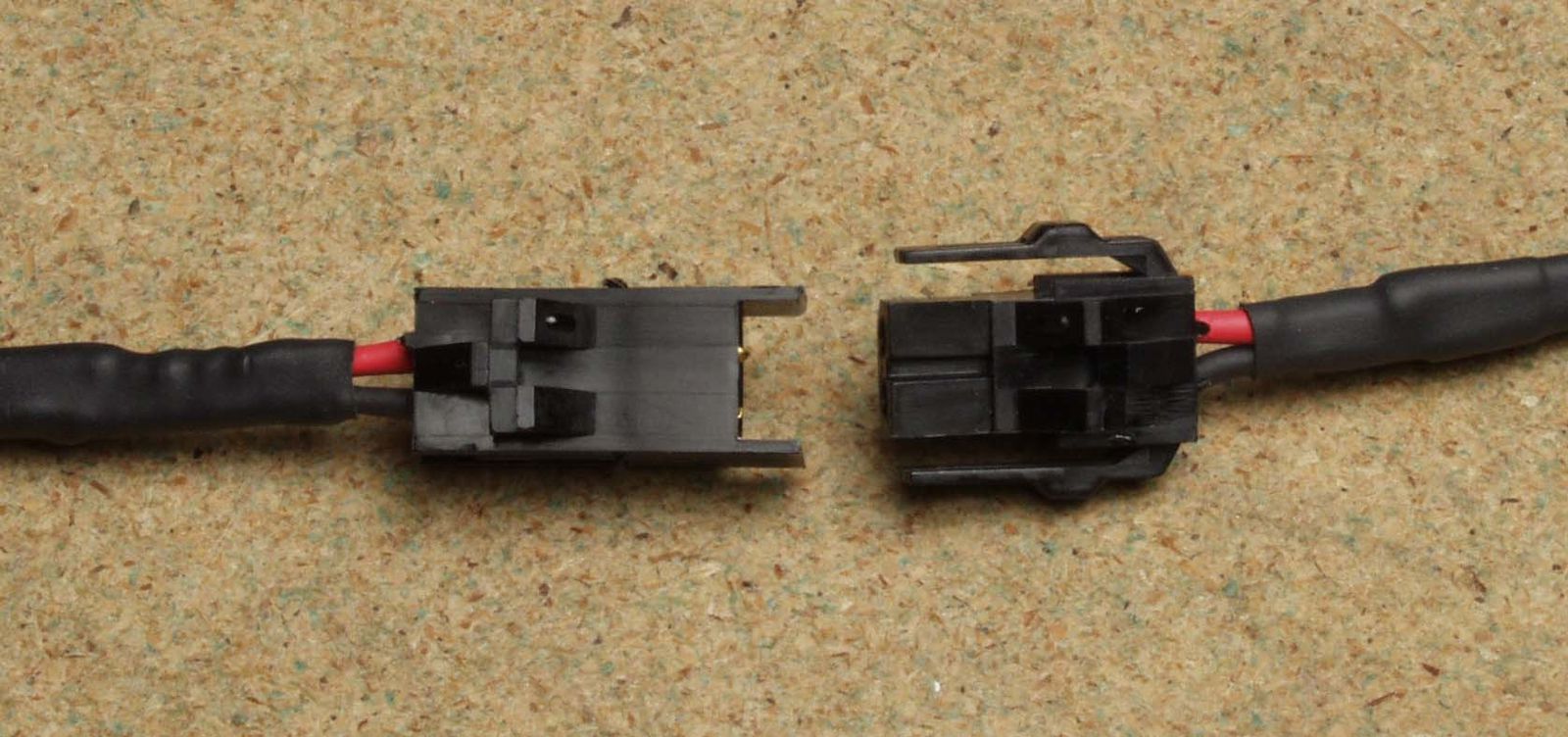
L 'alimentation au sol du contrôleur du moteur pré-lanceur se fait également par l'arrière de l' autogire, sous l'empennage. A gauche sur la photo un bout de câble est en attente il provient de notre BR01. A droite le câble fournit le courant, il est branché sur un accu et est fixé au sol. Sur ce câble également viendra se fixer une ficelle qui est attachée à notre aiguille. J 'ai trouvé dans mes tiroirs un connecteur qui laisse passer pas mal d' ampères et qu' une force de 300g désemboîte facilement .
Les plus malins ont compris....le loquet en position 1, haut bloqué, le connecteur emboîté, la ficelle tirant l'aiguille est attachée au câble ce dernier est fixé au sol.......et alors ?
A l'aide de la télécommande on monte en puissance le moteur pré-lanceur, quand le régime rotor est satisfaisant il suffit d'actionner le moteur principal Axi 4130/20, notre Autogire va tirer sur le câble et se libérer de lui même du loquet et de l'alimentation au sol....c'est pas beau ?... tout est automatique. Les plus méticuleux vont prévoir une ficelle un peu plus courte que le câble, de telle sorte que le loquet soit débloqué en premier suivi de l'alimentation. Là il ne faut pas chipoter...tout se passe en une fraction de seconde. Une variante , il n'est pas nécessaire de fixer le câble et la ficelle au sol, un accu d'un poids généreux fera l' affaire. Attention au connecteur électrique du câble...on a vu des autogires voler avec une grosse batterie Fulmen au cul..!!!
Voilà pour cette journée fructueuse....j ai bien mérité une bière !!!....la pensée philosophique du jour :
Voler, c'est quand on trouve un objet avant qu'il ne soit perdu. à méditer.
Mercredi 22 Avril 2009
Aujourd' hui il a fait très beau 23º sous abri, me retirer dans mon atelier avec un soleil pareil c'est de l'autoflagellation....mais quand même je n'ai pu résister. Les 4 servos à ma disposition sont de marque Robbe RS 600 et sont pratiquement comme neufs, le seul problème est que les connecteurs ne correspondent pas à ceux de mon récepteur. J' ai donc fait des courses au magasin de modèle réduit le plus proche pour me fournir en prises JR femelle et mâle ainsi que du câble. Il est donc facile à deviner mon emploi du temps. Maintenant c'est fait, les prises correspondent, vérifications faites tout fonctionne. Mon émetteur Multiplex 3030 m' a donné du souci, à l'écran plus rien, mon accu s' est suicidé, il n'a pas souffert, on appelle ça la mort subite. Pas d'accu, pas de test des servos....alors par la même occasion je me suis offert un accu tout neuf, il est en charge.
J'ai fixé un crochet au plafond de mon atelier....non ce n'est pas pour me pendre mais plutôt pour y accrocher l'autogire par l'axe du rotor afin de vérifier le centrage. A partir de maintenant on s'amuse, connaissant le poids de mes accus je dois les positionner de telle sorte que le plan rotor soit à l'horizontale. Comme le plan rotor par son montage est à 90º par rapport au mât et que ce dernier forme un angle de 7º avec le fuselage celui-ci doit donc être incliné vers l'avant d'un angle de 7º également. Pour faire simple je ne vais pas mesurer les angles de l'axe de mon fuselage mais vérifier la verticalité de mon mât. Au fond de mon atelier une armoire métallique, bien à niveau, me sert de repère. Je vérifie tout simplement si mon mât est bien parallèle au montant des portes de l'armoire, c' est très précis comme méthode. Pourquoi s' amuse t' on ?... chaque chose a son poids et chaque poids modifie le centrage, il faut aussi tenir compte des emplacements des contrôleurs, du récepteur. Je crois que le plus simple est de placer tous ces éléments sans trop se casser la binette, en dernier les accus qui sont les plus lourds feront pencher la balance tout simplement en les déplaçant le long du fuselage. Il ne faut pas perdre de l'esprit que le centrage est une chose mais le centre de gravité en est une autre aussi. Pour bien faire, l'idéal est que le centre de poussée du moteur passe par le centre de gravité mais là ce n'est pas aussi évident mais il faut en tenir compte dans le placement des éléments précités.
Voilà pour aujourd' hui, demain est un autre jour.....la pensée philosophique qui correspond à ma journée :
Pire qu'une pierre dans la chaussure est un grain de sable dans la capote. à méditer.
Vendredi 24 Avril 2009
Pour avancer dans mon projet je me suis mis au boulot, aujourd' hui j' ai fait des essais de consommation de mes servos, afin de savoir quel régulateur je dois utiliser pour mon alimentation stabilisée 5-6 V. J' ai donc fait des mesures de courant, les résultats sont surprenants. En bloquant la tête du rotor, l'autogire suspendu, les servos en plein effort consomment 480 mA , un régulateur de 2A sera suffisant avec une grande marge de sécurité.
Il m'a fallu démonter complètement l' appareil car pour des raisons d' esthétique j'ai pris la décision de faire passer le câblage de mes contrôleurs dans les profilés en aluminium anodisé. Pour plus de clarté, les 3 câbles du moteur brushless pré-lanceur entrent par le haut du mât et sortent par le bas. Les 2 câbles d'alimentation de ce même contrôleur passent dans le profilé du fuselage et sortent sous l'empennage. Au bout des câbles j'ai soudé les connecteurs correspondant à ceux du contrôleur . Ça fait plus professionnel mais surtout je veux rivaliser avec la qualité suisse, j'en fais un point d'honneur. Maintenant on peut regarder, c'est beau, on ne voit presque plus de câbles...plaisir des yeux..plaisir des yeux.. quand tu nous tiens. Demain je remonte tout, je ferai quelques photos pour ceux qui n'ont pas assez de patience pour lire mon texte.
Voilà c'est tout pour aujourd'hui, de toute façon le temps me manque en cette journée du 24 Avril, en effet le téléphone ne cesse de sonner tout le temps.....c'est mon anniversaire....alors je pense que j'ai des circonstances atténuantes.
A demain donc... si bien sûr j'ai les idées claires.!!..la pensée philosophique :
Un intellectuel assis avance moins vite qu' un con qui marche......à méditer.
Samedi 25 Avril 2009
Je me suis levé tôt ce matin sans aucune migraine handicapante des suites de la soirée arrosée....avec modération. Le temps de recharger les accus de mon appareil photo me voilà prêt pour quelques prises de vues. Pour information, les photos ne sont pas faites en quelques minutes mais bien en plus de 2 heures . Il faut choisir les angles, placer les pièces, vérifier la photo, flash ou extérieur, bref je suis sur les genoux car pour chaque photo je suis en apnée profonde. Il faut me voir, grâce à ces exercices réguliers je peux me vanter d' une cage thoracique supérieure à la moyenne et d' une capacité vitale en nette progression ..5.8 litres....on peut dire que je ne manque pas d'air..!!!
Voici donc le fruit de mon travail.

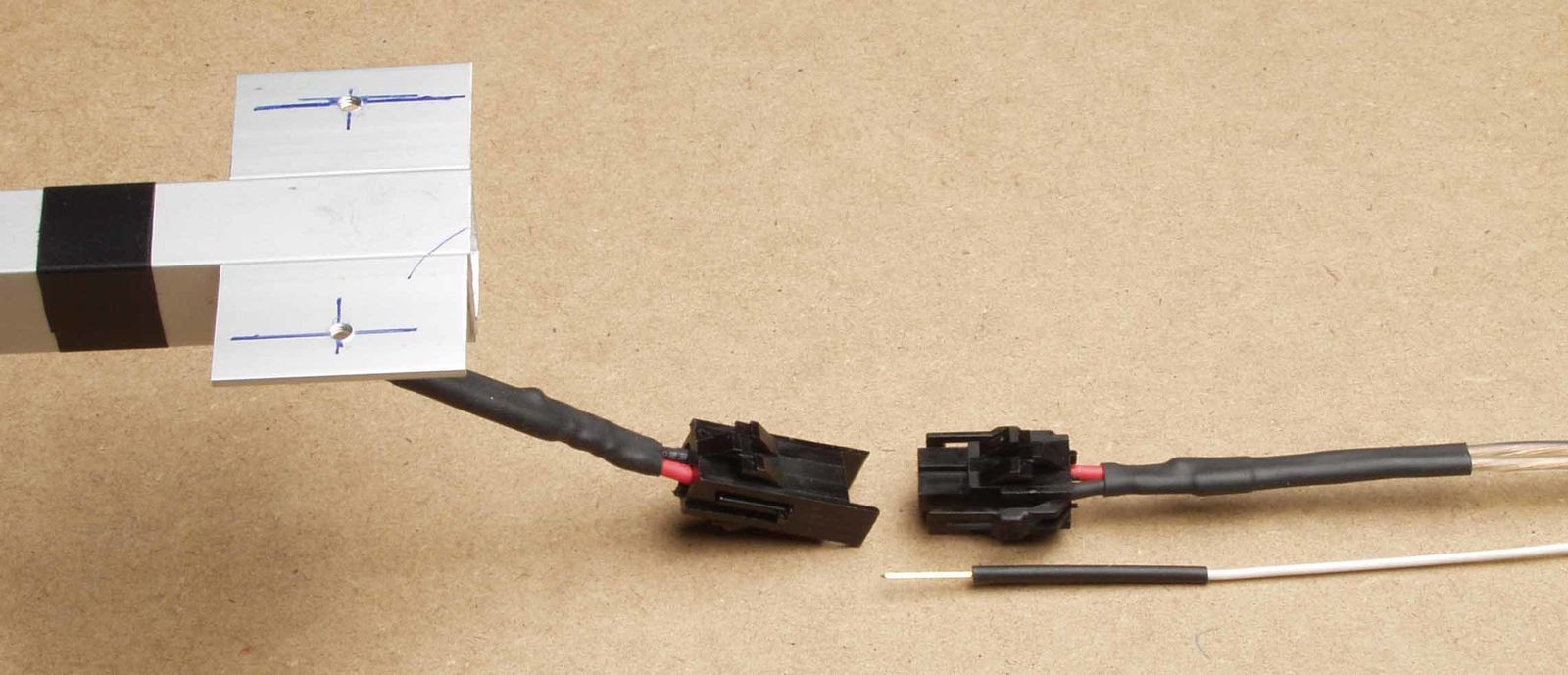
Cette pièce remplace la fameuse aiguille. A l'origine c'est une patte d'un socle pour circuit intégré, un câble assez souple y est soudé, la gaine rétractable va couvrir la soudure ..ça fait plus pro !

Comme on peut le constater, la fiche en or s.v.p, va bloquer notre poulie qui elle va libérer le loquet du rotor dès que l'on tire sur le câble blanc. Celui-ci est attaché en aval de la prise d' alimentation de sorte qu'une traction du câble d'alimentation du moteur pré-lanceur donne le start à cette manoeuvre. En premier le câble blanc se retire puis le connecteur d'alimentation se libère et coupe ainsi l'alimentation du moteur. Cette traction n'est pas faite manuellement mais par la propulsion du moteur principal AXI 4130/20. La force nécessaire pour activer ce mécanisme est de 210 g pour la fiche, à 320g le conneteur se désemboîte, c'est de l'ordre du négligeable pour notre moteur .

A l'autre extrémité du câble d'alimentation un accu de bonne taille va résister à la traction de notre BR01. Le moteur pré-lanceur est prévu pour une tension d'alimentation de 3 S lipo soit 11.1 V, l' accu sur la photo fait un peu plus, c'est à dire 12 V . Pour réduire cette tension on peut constater qu'au bout de chaque fiche, prise dans la gaine rétractable, se trouve une diode de 15 A, cela permet de faire chuter la tension de 1.4V environ , le moteur dispose donc d'une tension de 10.6 V ce dont il peut se réjouir.

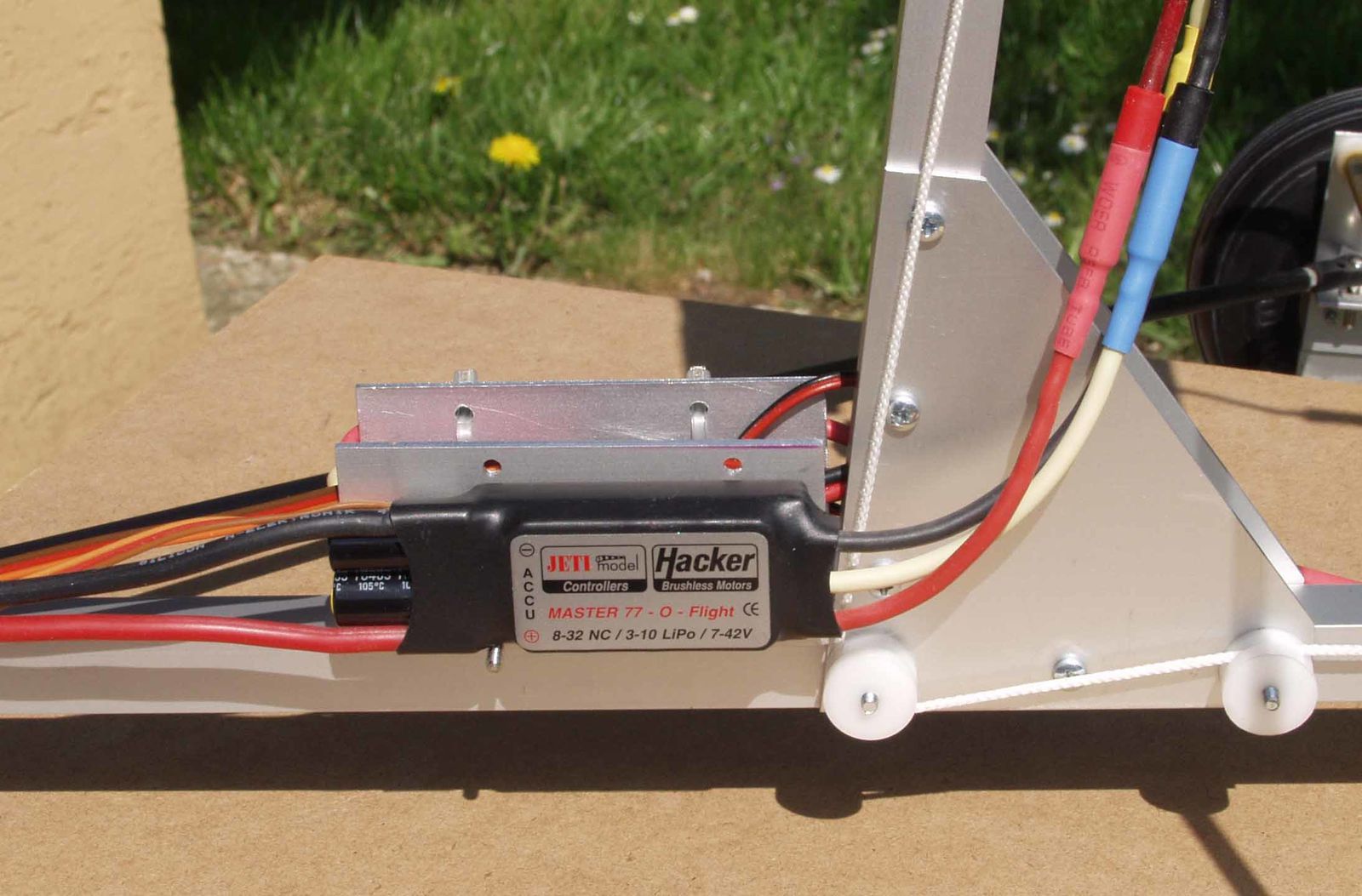
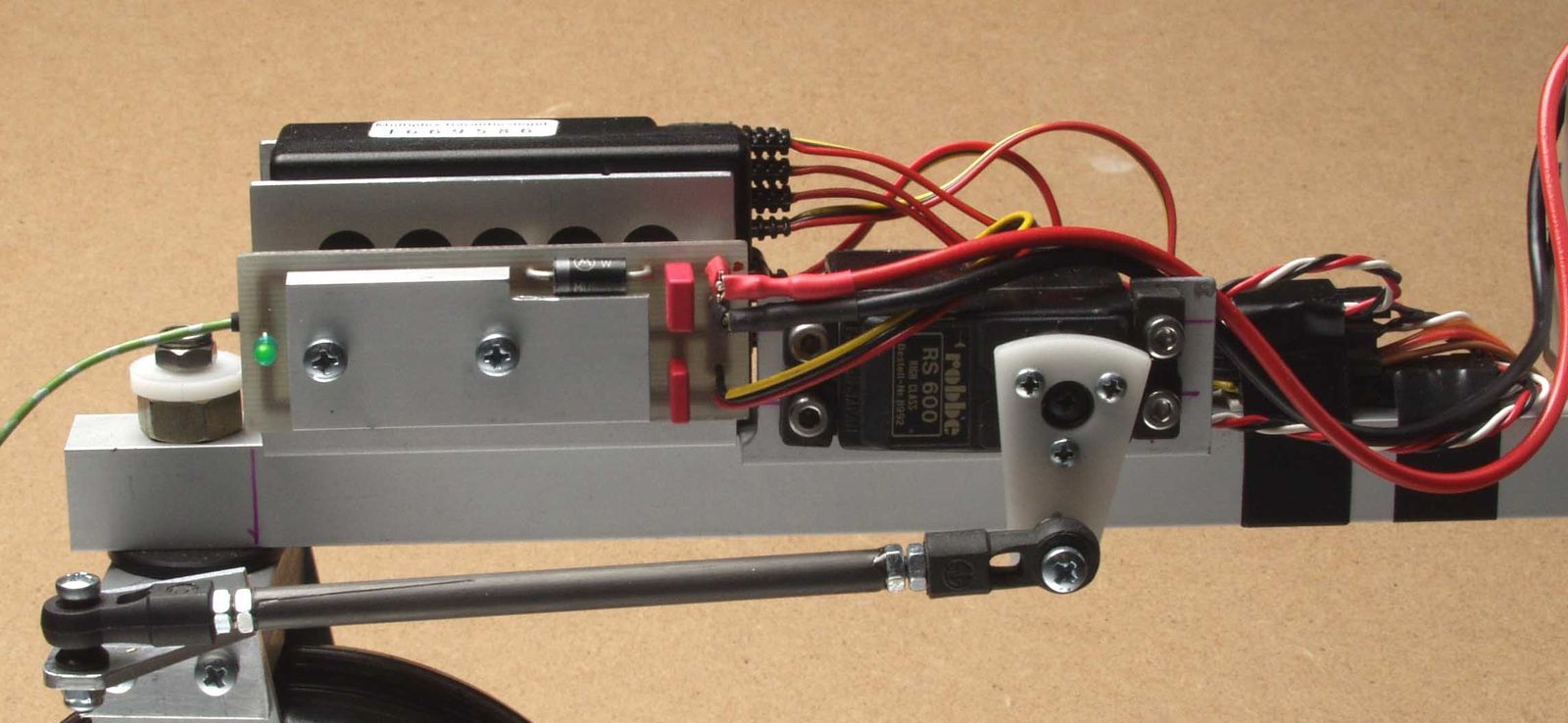
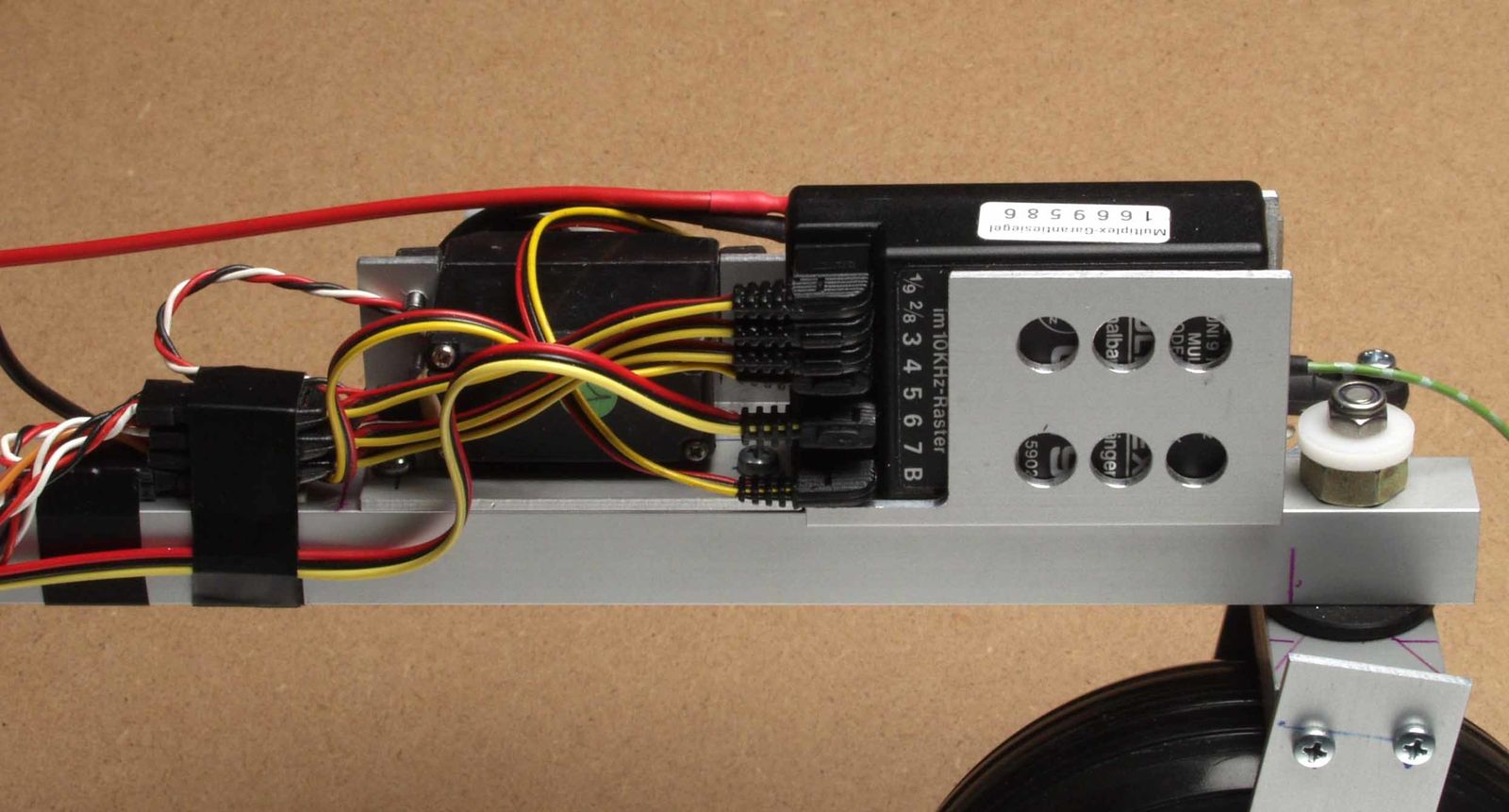
Voilà le contrôleur du moteur principal, il ne possède pas de BEC, il sera fixé contre la pièce en aluminium anodisé qui par la même occasion joue le rôle de radiateur pour dissiper les calories.

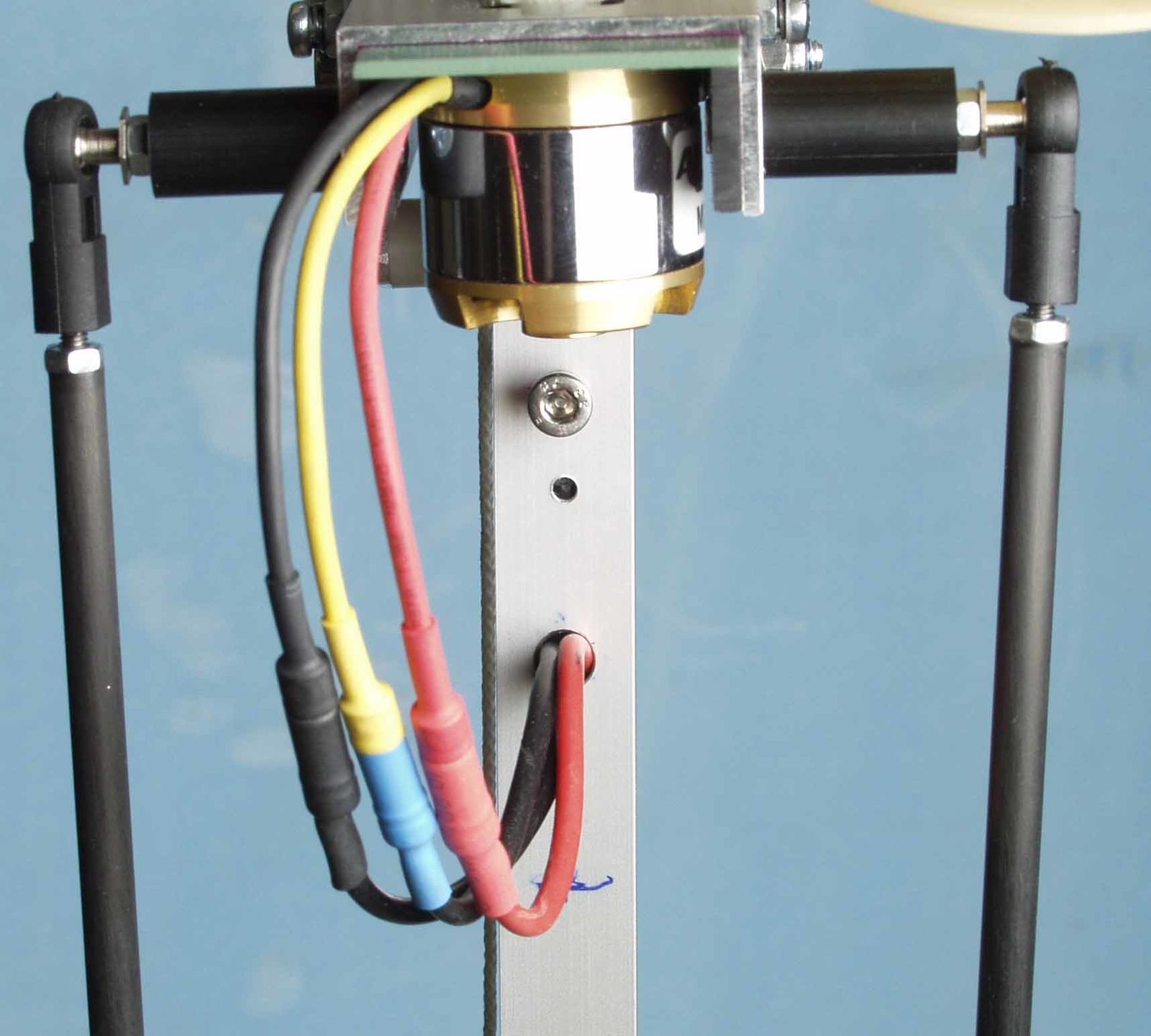
De l'autre coté, le contrôleur du moteur pré-lanceur est déjà fixé. Lui possède une prise BEC mais inutilisable du fait que l'alimentation lui sera coupée dès que l'autogire avance. Les câbles d'alimentation à gauche sur la photo vont se loger dans le profilé alu pour ressortir sous l'empennage.

Sur le haut du mât les câbles du moteur viennent aussi se loger à l'intérieur du profilé...le bordel est caché ! Ces trois câbles ressortent au pied du mât pour venir se connecter sur le contôleur.
Les deux dernières photos montrent la même chose que les précédentes mais sous un autre éclairage...pour les connaisseurs c'est fait au flash avec une boîte à lumière.
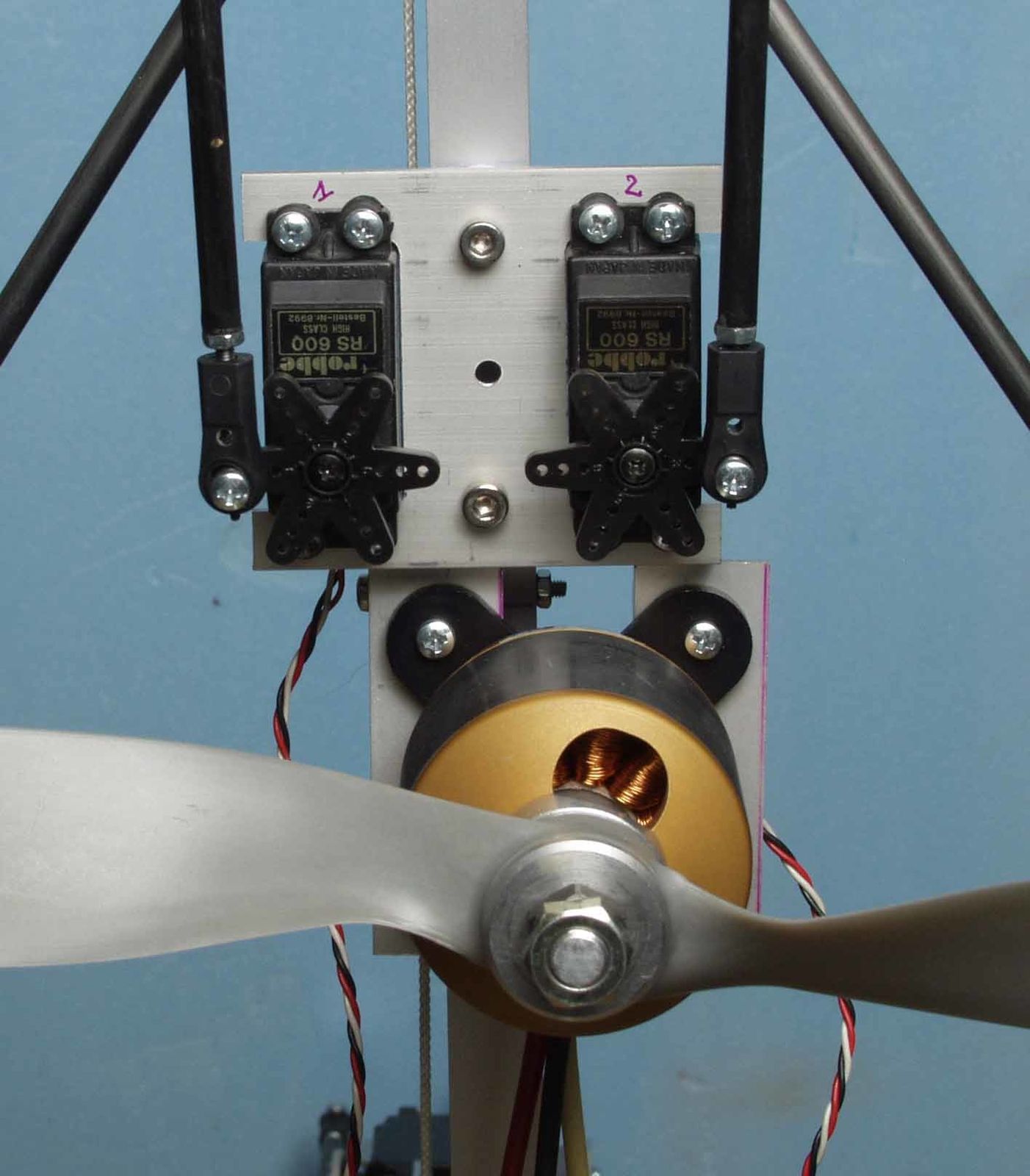
Une vue de l'arrière montre le décalage vers la droite du moteur, de cette manière l'autogire se déplacera droit devant, on compense ainsi les forces induites du couple du moteur principal.
En photo je vous ai gâté cette fois ci....qui sait attendre....!!
Avant de vous quitter j' aimerais faire un petit coucou à MONSIEUR AUTOGIRE , Jean Cousin, qui je sais suit régulièrement la progression de cette construction. Il est d'une gentillesse sans limite et son site est plus que remarquable. Voici son adresse, " Scale Autogiro " sur Google . Allez lui rendre visite, vous ne perdrez pas votre temps , on en ressort plus intelligent et plus humble. Jean je te remercie pour tous tes conseils d'expert sans toi ce blog n' existerai pas, ou peut être que si, mais avec plein de bêtises.
Je remercie aussi toutes les personnes qui me soutiennent dans ce projet, je ne peux pas vous citer tous mais le dernier quand même , Aéro66 .
Mon blog est visité chaque jour par de nombreux passionnés, depuis le 15 Mars plus de 400 personnes sont venues me rendre visite......je n'ai plus assez de chaises pour tous !! ....jamais je n' avais imaginé un tel succès .
Un GRAND MERCI à vous tous.
Avant que je vous donne rendez vous pour demain, n'oublions pas la pensée philosophique :
Un string c'est le seul instrument à vent à une corde ! ......à méditer.
Lundi 27 Avril 2009
Le BR01 commence à s'étoffer, aujourd' hui j' ai monté la petite roue arrière réalisée les jours précédents. Le montage est relativement simple mais m' a pris pas mal de temps jusqu' à ce que je sois satisfait. Une corde à piano de 2 mm de diamètre assure la souplesse nécessaire à la roue.

Le pliage des tiges d'acier doit se faire dans un étau, les deux ensemble de façon qu' elles soient rigoureusement identiques. A gauche de la roue un axe en Delrin de 6 mm est percé aux deux extrémités (perpendiculaire à son axe ) à de 2mm.Cette pièce va se loger dans un trou de 6 traversant le profilé aluminium, à chaque bout deux petites vis M3 assurent un bon serrage.La pièce en laiton de 5mm est en fait l'axe de la roue, celui-ci est percé à 2mm afin de pouvoir réaliser le montage suivant.

Au centre de la photo une vis M3 L= 30mm traverse la petite pièce en Delrin. On peut remarquer que cette dernière est rainurée à 2mm sur une profondeur de 1.8mm, il en est de même pour la seconde pièce qui elle est taraudée à M3 de façon à remplir la fonction d' écrou. La vis L=30 traverse de part en part le profilé aluminium, la corde à piano se place dans les rainures, un serrage franc maintient parfaitement l'ensemble.

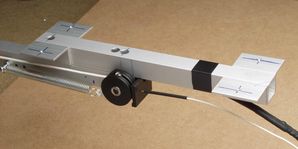
Voici le montage effectué, il est possible d' approcher ou d' éloigner la roue de la queue de l' autogire. Le câble d'alimentation du moteur pré-lanceur a largement de la place au-dessus de la roue, l'espace est libre pour notre mécanisme de déblocage du loquet. Le câble blanc qui libère la poulie passe à gauche de la roue.
L'autogire prend lentement une forme moins squelettique, les différents éléments ont eux aussi un poids et ces poids s'ajoutent inéluctablement...attention à l' addition, la balance ne triche pas. Je reste confiant pour ne pas dépasser le poids final maximum de 3.5 Kg que je me suis fixé.
J' avais précisé plus haut dans mon texte mon intention de changer l' hélice APC 16x10 par une tripales 16x10 . Commandée chez Graupner je viens de la recevoir, surprise, le poids n'est pas négligeable, elle fait pratiquement 100g de plus que l' APC, je pense que pour le moment elle va dormir dans un tiroir. Si l'hélice APC 16x10 ne me satisfait pas entièrement je dispose d'une 17x10 qui se monte sans problème.
Un grand merci à Daniel Bertolino
Voilà pour aujourd' hui....encore une chose de faite .....la pensée philosophique du jour..!
Mieux vaut perdre sa montre que de perdre son temps......à méditer..... @ plus.
Mercredi 29 Avril 2009
Je viens de prendre quelques photos pour illustrer mes dernières réalisations. Les accus on ne va pas les poser sur le châssis de l'autogire, il faut bien sûr une fixation solide vu leurs poids. Pour le récepteur j'ai confectionné un petit boîtier en alu sur lequel viendra se fixer également le régulateur 5 ou 6 V.


Le récepteur se loge dans son boîtier au 1/10 mm, c'est de la chance, de nombreux trous de 8mm allègent le tout. La position du récepteur est fixe une fois pour toute, il sera maintenu par des élastiques.

Le boîtier est réalisé avec deux cornières en alu et deux cornières en PVC usinées pour gagner du poids.

Le boîtier pour les accus est très rigide, j' ai laissé un peu de jeu pour placer au fond et sur les bords du Dépron de 3mm afin de rendre le contact boîtier accus plus moelleux. Les prises des accus on été changées , ces dernières sont plus pratiques que les précédentes. Le boîtier est fixé sur le profilé en aluminium par 4 vis M3 dont deux traversantes. Pour le réglage de l'autogire, plus précisément le centrage, les accus dans leur boîtier peuvent se déplacer à gauche et à droite afin d' ajuster au mieux l'angle. Des petits déplacements, du fait de la masse des accus, font varier l'inclinaison du fuselage. C'est un avantage certain surtout si l'on décide de rajouter un pack d'accus, il faut dans ce cas déplacer l'ensemble vers le mât du BR01. Il suffit de percer de nouveaux trous dans le profilé alu et y fixer le bloc d' accus. Les vis traversantes ont une utilité supplémentaire , elles servent de point d' accroche aux élastiques qui vont maintenir les accus. Comme mon poste à soudure était encore chaud j'en ai profité pour confectionner quelques câbles de raccordement.
Encore une petite avancée, lentement on arrive au bout. Ce qu'il reste à faire c'est le régulateur et le montage des pales. Ensuite il faudra vérifier toutes les vis de fixation, les sécuriser avec du frein filet ou des écrous auto- freinés. Avec la télécommande il faudra ajuster tous les servos dans la position neutre et régler définitivement notre Autogire. Il y a encore du boulot en perspective !!
Merci à Emmanuel Seyssens pour ses encouragements, faites comme lui, au bas de la page vous pouvez me joindre en cliquant sur commentaire.
Nous sommes mercredi 29 Avril , demain je vais vous fausser compagnie jusqu' à dimanche prochain inclus, prenons donc rendez vous pour lundi. Je vais faire un petit séjour en Allemagne en Bavière, plus précisément à Bad Aibling, pour faire le plein de bière !!!! et surtout parfaire mon allemand.
Je sais que la Belgique s'intéresse énormément à ce projet et même les Allemands bien que le texte soit en français, c'est signe que le modélisme ne connaît pas de frontières:
"Vielen Dank an Alle fuer euer Interesse an der Herstellung meines Tragschraubers ! Ich bin abwesend und werde erst am Montag 4.Mai wieder zurueck sein"
Je vous dis à Lundi si le coeur vous en dit.....la pensée philosophique :
Pourquoi lave t'on une injure alors qu'on essuie un affront........à méditer ..... et pour les jours suivants
Mieux vaut être optimiste et se tromper que pessimiste et avoir raison......@ plus.
Lundi 4 Mai 2009
Me voilà de retour de Bavière, il a fait très beau, je ne peux que vous conseiller de vous y rendre, la région est magnifique. A présent je suis à nouveau disponible pour poursuivre la construction de notre autogire.
Pour tester le bon fonctionnement des servos il me faut une alimentation, ne sachant pas s' ils acceptent une tension de 6 V je me suis décidé pour une une tension régulée et stabilisée de 5 V.
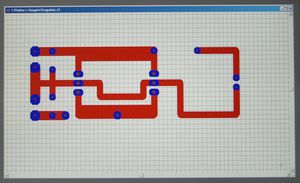
A l'ordinateur j'ai réalisé le schéma électronique qui me permet de graver ce circuit sur une plaque époxy cuivrée

Le circuit se compose de deux régulateurs 5V montés en parallèle, d'une Led alimentée via une résistance limitant le courant, de deux condensateurs de filtrage et d'une diode sécurisant la polarité. La tension 11.1V provenant d'un des deux accus entre en bas à gauche, le plus est sur la diode. La tension de 5 V sort en haut , le moins est commun aux deux tensions. Attention les deux régulateurs seront montés à l' envers c'est à dire la partie métallique destinée à être en contact avec un refroidisseur est positionnée vers le haut.
Voici ce à quoi va ressembler le circuit imprimé, une impression en noir sur papier calque par une imprimante laser donne le typon suivant.

L'opération suivante consiste à insoler une plaque prédécoupée d' époxy présensibilisé. En clair, on place le typon sur la plaque d"époxy recouverte d'un vernis sensible aux UV, un éclairage de plusieurs minutes par des tubes UV reproduit le circuit sur la plaque. Par la suite on plonge la plaque dans un révélateur qui se charge d' éléminer le vernis exposé aux rayons UV. Le cuivre se trouve à nu, sauf le circuit qui lui reste protégé par le vernis car les UV n'ont pas traversé la couche d'encre du circuit.
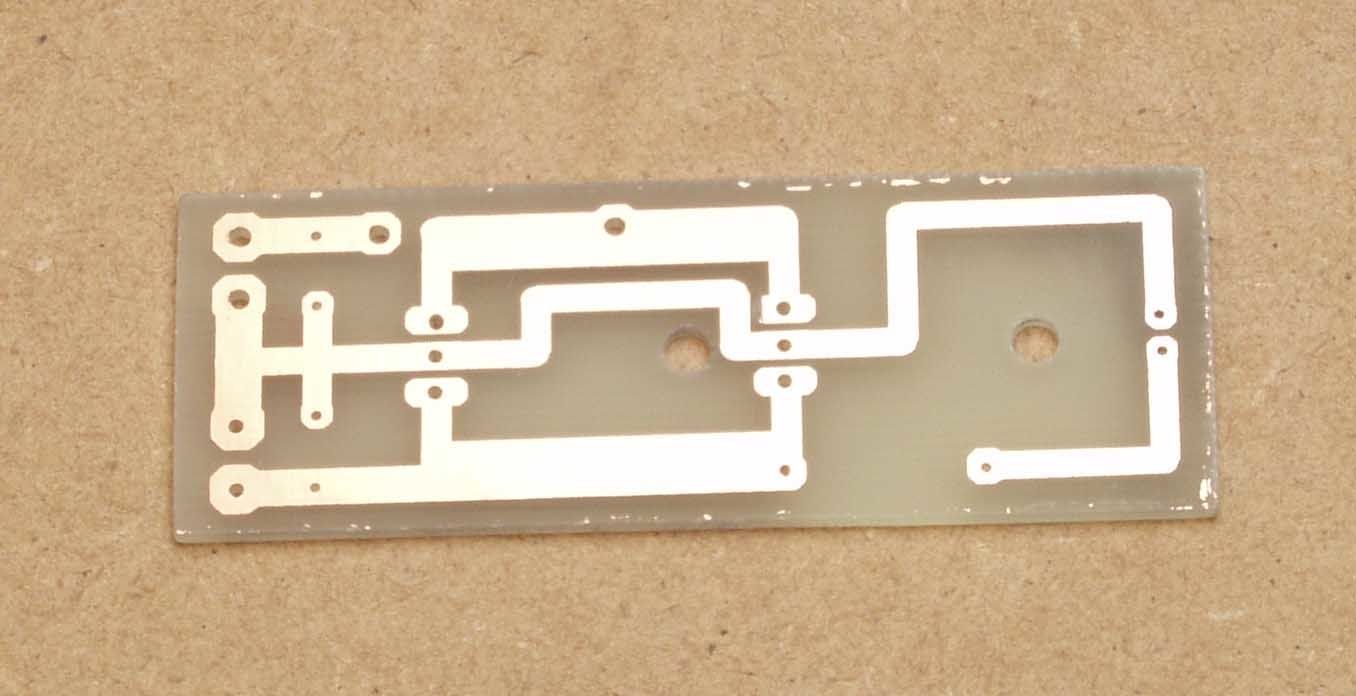
La seconde manipulation consiste à plonger la plaque dans une solution de perchlorure de fer qui va graver le circuit. Le perchlorure de fer va ronger le cuivre non protégé par le vernis et donnera ce que montre la photo. Il reste maintenant à percer les différents trous où les composants électroniques seront soudés.

Le montage est terminé, on vérifie son bon fontionnement en mesurant si pour une tension d'entrée supérieure à 6 V la tension de sortie reste fixe à 5V. Si la Led verte s' allume c'est signe que tout est en ordre mais on vérifie tout de même les tensions avec le multimètre. Voici notre BEC, des essais sont nécessaires surtout au niveau de la température des régulateurs, ce montage permet un courant de 2 A maxi. Il est possible de monter un refroidisseur sur les deux régulateurs s'ils chauffent de trop.Je pense que pour une consommation maxi de 500mA on peut se passer d' un refroidisseur. Dernière opération, on va protéger le circuit imprimé côté cuivre par un vernis en bombe aérosol .
Voilà pour aujourd' hui, demain est un autre jour.....la pensée philosophique...
C'est curieux, se refaire les seins, ça coûte la peau des fesses.......à méditer...... @ plus.
Mercredi 6 Mai 2009
Depuis hier je me suis occupé à parfaire le câblage, c'est à dire, ajuster au plus juste la longueur des liaisons électriques et surtout de les dissimuler le mieux possible.
J 'ai effectué des tests en puissance du régulateur de tension 5V. En branchant une résistance de puissance sur la sortie de 5 V je relève sur mon multimètre un courant constant de 565 mA, bien plus que le courant maxi mesuré précédemment. Au touché des régulateurs la chaleur est bien présente mais sous cette charge les deux composants ne bronchent pas, la tension reste stabilisée à 4.95 V même après 10 bonnes minutes de fonctionnement. Malgré ça j'ai pris la décision, par mesure de précaution, de monter sur les deux régulateurs un refroidisseur en aluminium afin de dissiper les calories. Cette pièce a été réalisée à partir d'une chute d'un profilé alu et adaptée à son positionnement sur la platine. Dans les conditions d'utilisation normale le refroidisseur est ventilé par le déplacement de l'air, donc bien mieux refroidi que dans mon test en atelier. La chaleur qui se dégage des régulateurs est proportionnelle au courant consommé ainsi qu' à la valeur de la tension à réduire, dans notre cas 11.1V - 5V soit 6.1V .
Le refroidisseur en alu est fixé par deux vis traversant la platine et elle même vissée sur le boîtier du récepteur. Deux petites entretoises de 6 mm d' épaisseur on été nécessaires pour écarter le circuit imprimé de toute partie métallique.Dans cette position le régulateur se trouve dans une position idéale pour une bonne ventilation et donc un bon refroidissement
.
Vu de l'autre côté le câblage est bien rangé, bien fixé, ça fait propre. Avec la télécommande j'ai vérifié toutes les fonctions, c'est à dire le rotor dans ses inclinaisons, la dérive et la roue avant, et bien sûr les deux contrôleurs des deux moteurs..... tout baigne parfaitement...ça marche comme prévu.
En fixant les câbles avec de la bande adhésive j'ai également vérifié toutes les vis, c'est à dire leur serrage et là ou je pouvais placer des écrous freinés je n'ai pas hésité. Le BR01 prend de l' allure, je n'ai pas encore vérifié le poids mais je crois pouvoir tenir les 3.5Kg maxi.
Il me reste à monter les pales mais avant de pouvoir le faire, je dois les couper à la bonne longueur, équilibrer au même poids les 3 pales et réaliser le système de fixation adapté aux porte-pales.
Voilà pour aujourd' hui, demain est un autre jour......la pensée philosophique...
L'équilibre est à mi-chemin entre les deux extrêmes.......à méditer....@ plus.
Vendredi 8 Mai 2009
Je viens de déballer les pales de leur carton, belle finition, bonne protection de l'emballage, on peut dire que c'est de la super qualité. Les pales ont été commandées aux Etats Unis chez AéroBalsa, la référence est la suivante : RotorBlade Airfoils Réf 23436 RB ( 2.75" X 36" ) le set de 4 pièces vaut 40 Euros.
Avant de pouvoir monter ces pales sur leur porte-pale il est primordial de construire un gabarit qui positionne la pale de façon à ce que toutes les 3 soient percées de manière identique. D' abord je dois déterminer où je vais percer le trou de fixation. Pour ce faire j'ai suspendu une pale à l'aide d' une aiguille plantée perpendiculairement à une extrémité. L'aiguille prenant appui sur un support fixé sur le montant d'une porte, si la position de l'aiguille est correcte, la pale doit être parallèle à ce montant, on aura auparavant vérifié au niveau la verticalité de cette porte. Le gabarit doit être d'une construction soignée, c'est important, il pourra toujours servir en cas de casse.
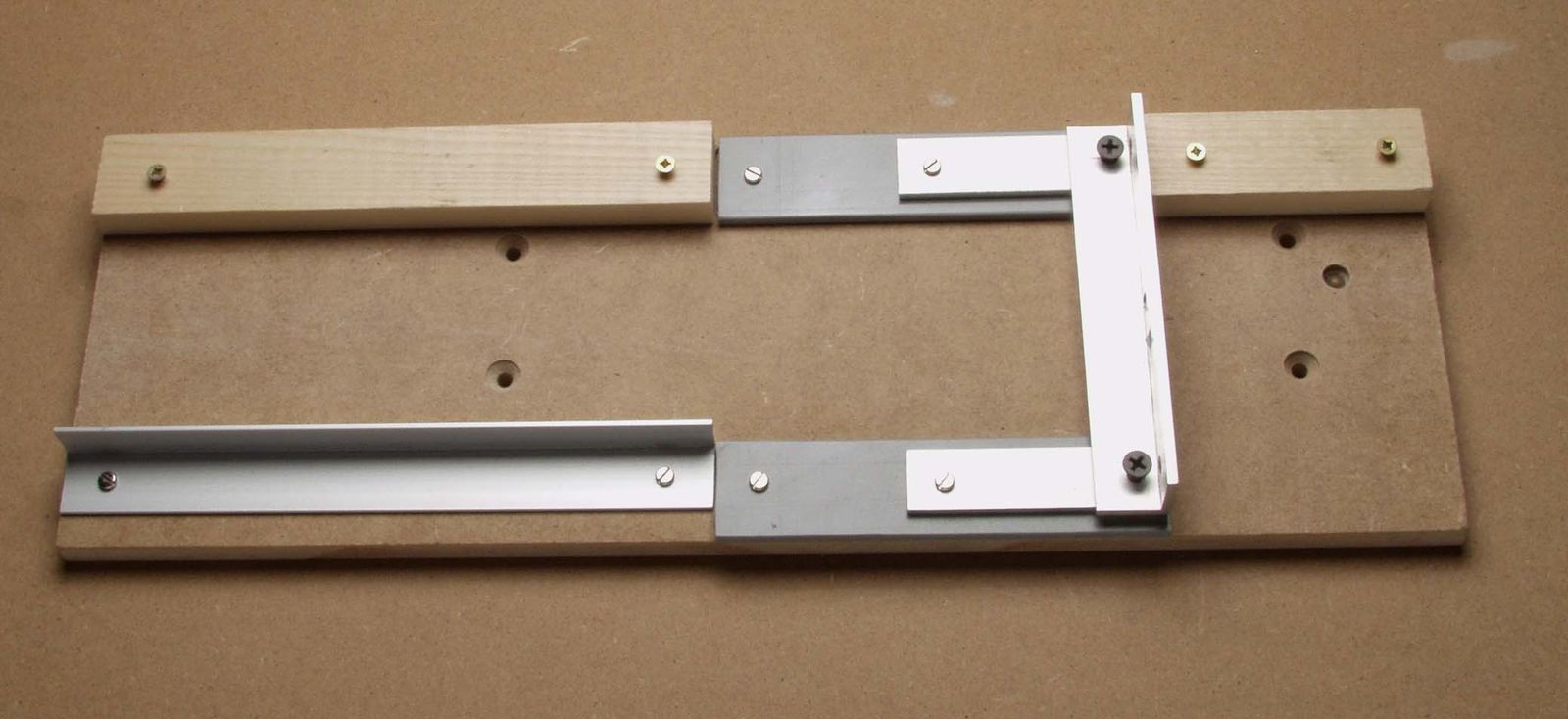
Voici ce fameux gabarit, la pale prend appui sur les deux lattes de bois, la cornière en alu presse modérément la pale sur le support, l'extrémité de la pale est positionnée sur l'extrémité du support.

La pale ne peut absolument pas bouger, l'ensemble est fixé sur la table de la fraiseuse. Le perçage peut se faire, il suffit de dévisser la cornière en alu qui presse la pale pour y placer la suivante. J'ai prévu un renfort de fixation de la pale mais je ne dois pas dépasser une épaisseur de 10 mm, c'est l' écartement d' un porte pale. Pour y parvenir il est nécessaire de fraiser la pale sur une profondeur de 1mm de chaque côté .L'épaisseur d'origine de la pale est de 7mm

Voici le renfort de fixation, son emplacement doit être fraisé pour l' y coller, la pièce en Delrin m' a servi pour effectuer un centrage parfait. Sur l'autre face de de la pale on effectue la même opération.

Cette vue est plus parlante que les précédentes, une nouvelle pièce en Delrin viendra se loger dans le trou traversant , le serrage de la pale dans le porte pale se fera par cette pièce qui n'est pas encore réalisée....donc à suivre.
Voilà pour aujourd' hui.... demain est un autre jour .... la pensée philosophique :
C'est en devenant dur de la feuille que l'on devient mou de la branche.......à méditer @ Plus
Samedi 9 Mai 2009
Encore une journée passée dans mon atelier, je me mets la pression car dans deux semaines je retourne en Ardéche pour un certain temps, là bas la construction de mon atelier doit débuter et comme je suis le patron et
l' ouvrier à la fois du boulot il va y en avoir.
Grace à mon gabarit j'ai pu fraiser les emplacements des renforts de pale. Ces derniers sont découpés dans du contre plaqué de bouleau de 2.2mm d' épaisseur.
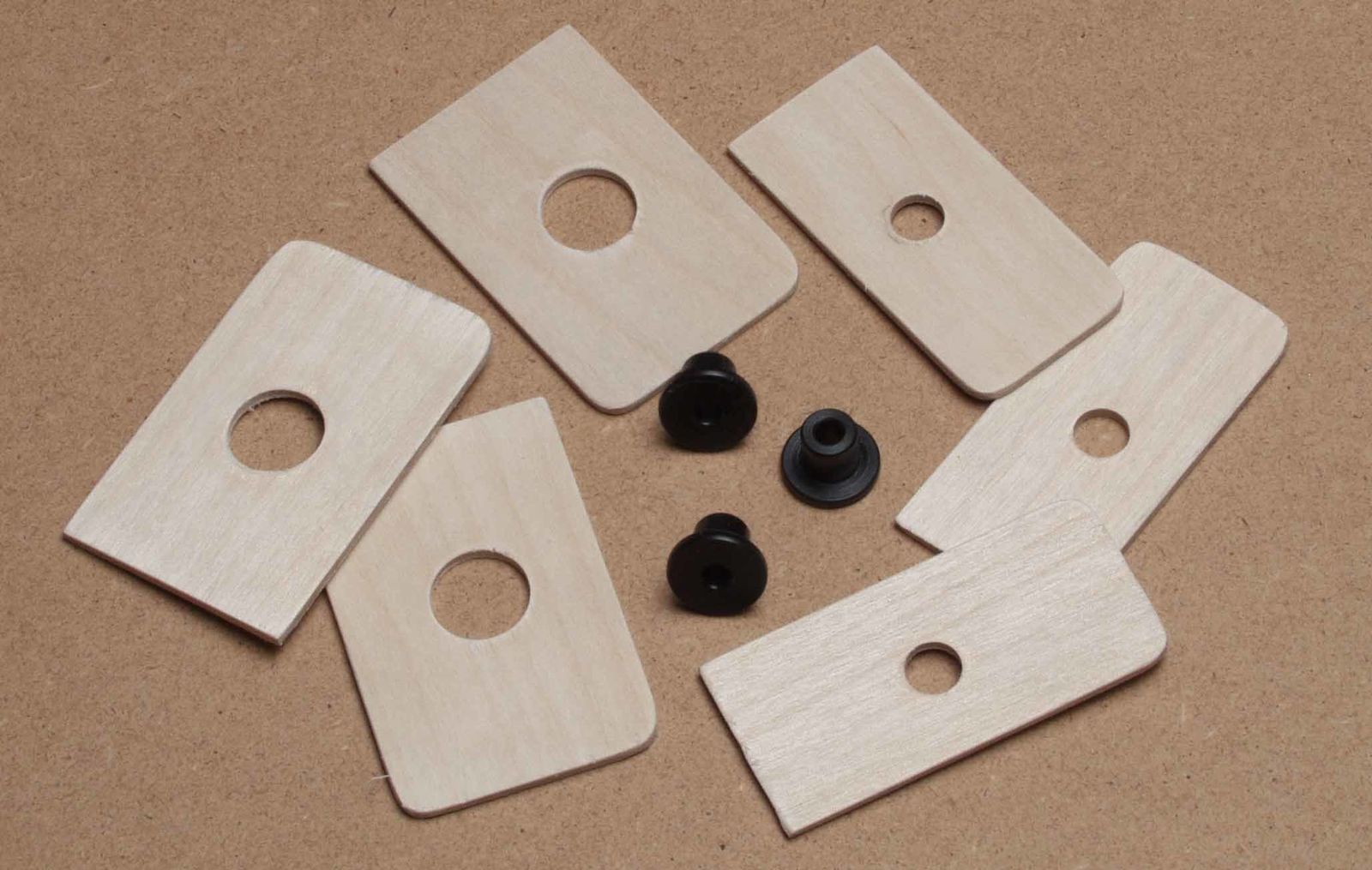
Il y a 6 éléments, les renforts avec un grand trou de 14mm seront collés sur le dessous de la pale et ceux avec les petits trous 8 mm sur le dessus. La pièce en Delrin noir va traverser la pale et contenir la vis de serrage M4. Le porte-pale d'un écartement de 10mm va recevoir la pale , le serrage se fait en appui sur les éléments de contre plaqué. L'axe sera muni d'un écrou freiné qui a l'avantage de doser le serrage et ainsi permettre le positionnement de la pale en mouvement, en effet la pale doit pouvoir pivoter autour de l'axe .
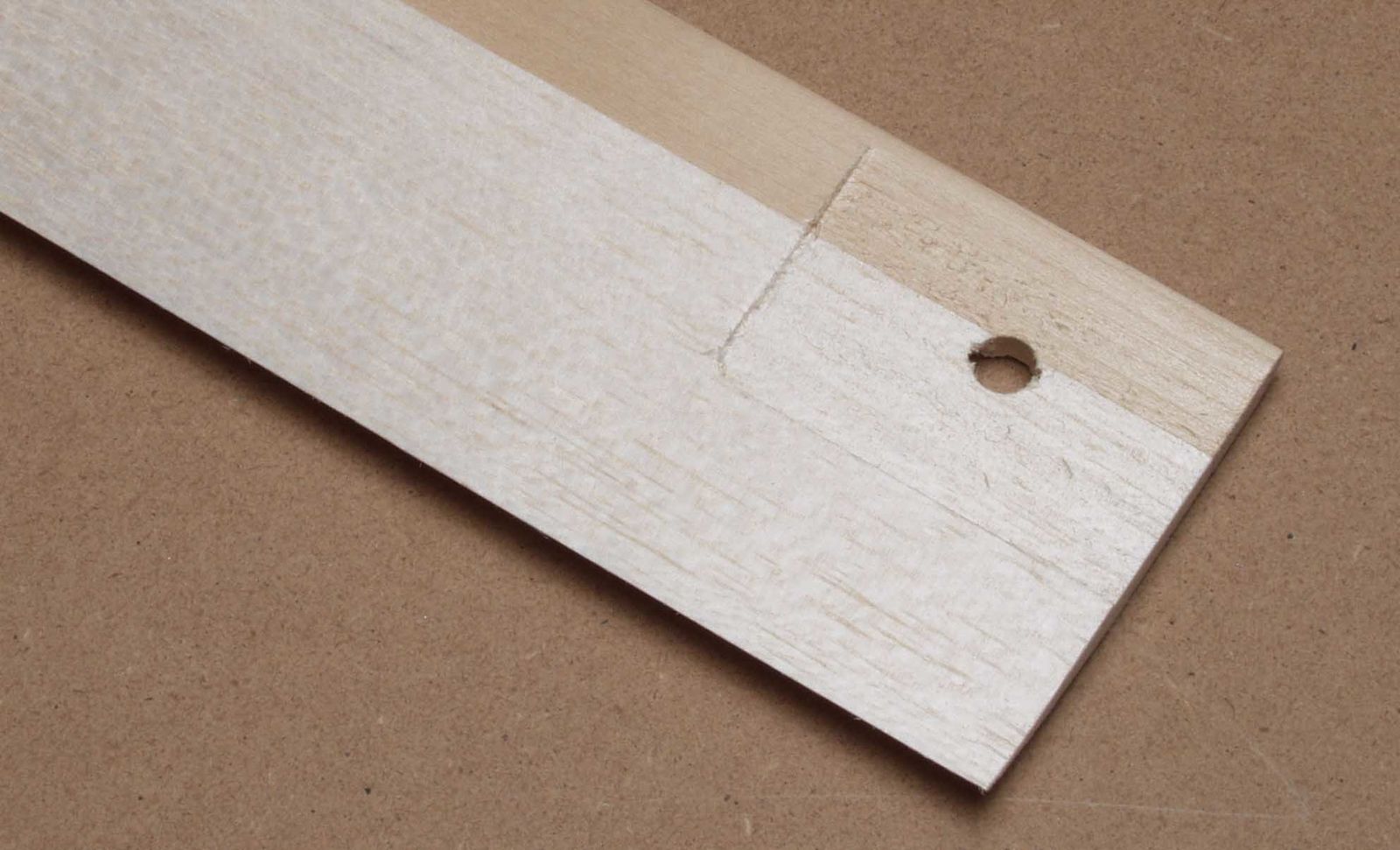
Sur cette photo on voit le travail de la fraise, 0.8mm de balsa ont été enlevés, le renfort y sera collé. Sur l'autre face la même opération a été faite mais à une profondeur différente afin d' arriver à une épaisseur totale de 9.8mm, et pas 10mm, car je me suis donné une marge pour l'épaisseur éventuelle de la colle.
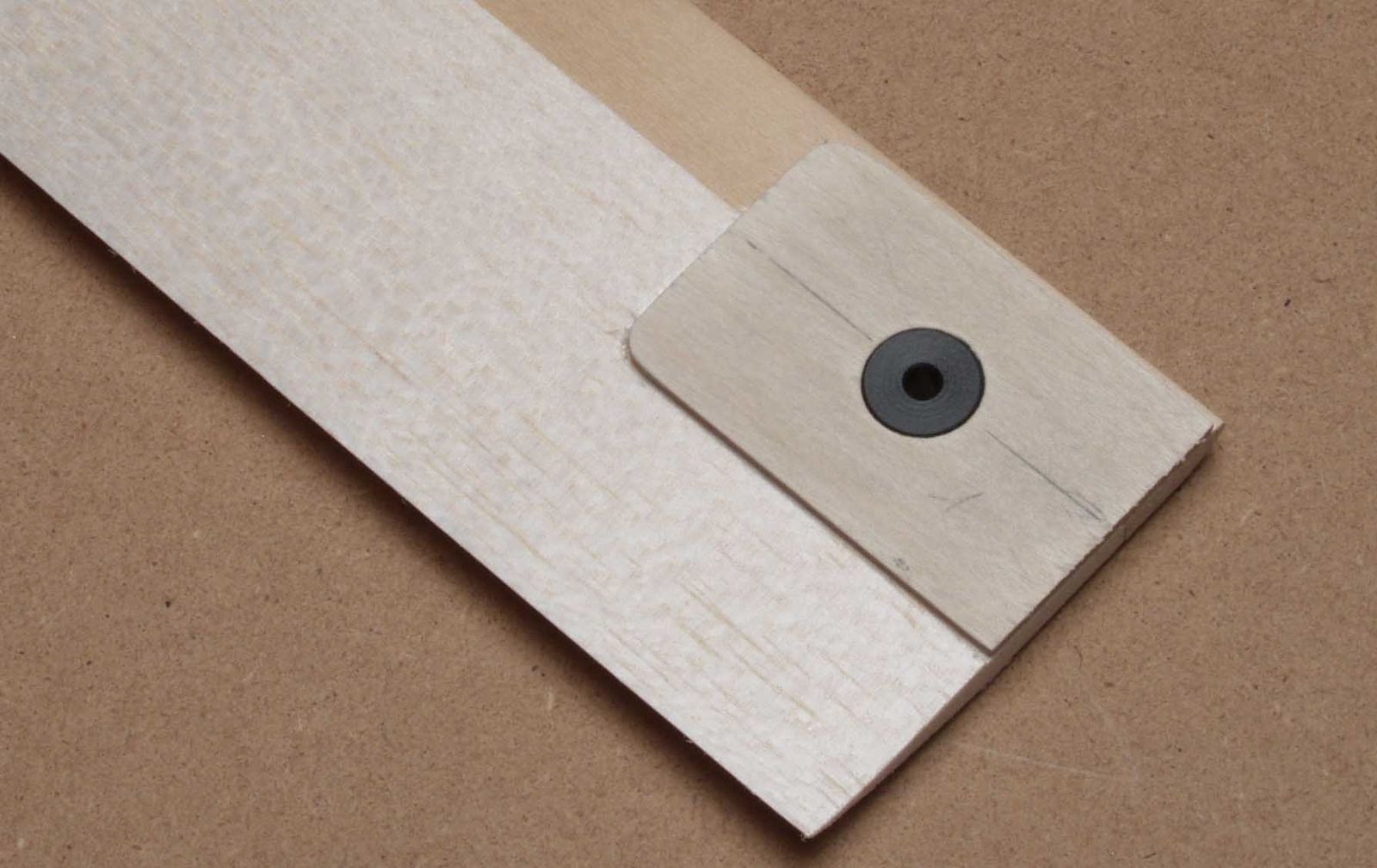
Le montage est effectué, ici on voit le dessous de la pale, la pièce en Delrin traverse la pale mais ne prendra pas appui au moment du serrage car la côte est réduite de 0.2mm.
Là nous voyons le dessus de la pale, le renfort est bien logé dans son emplacement, il sera collé également tout comme la pièce en Delrin noir.

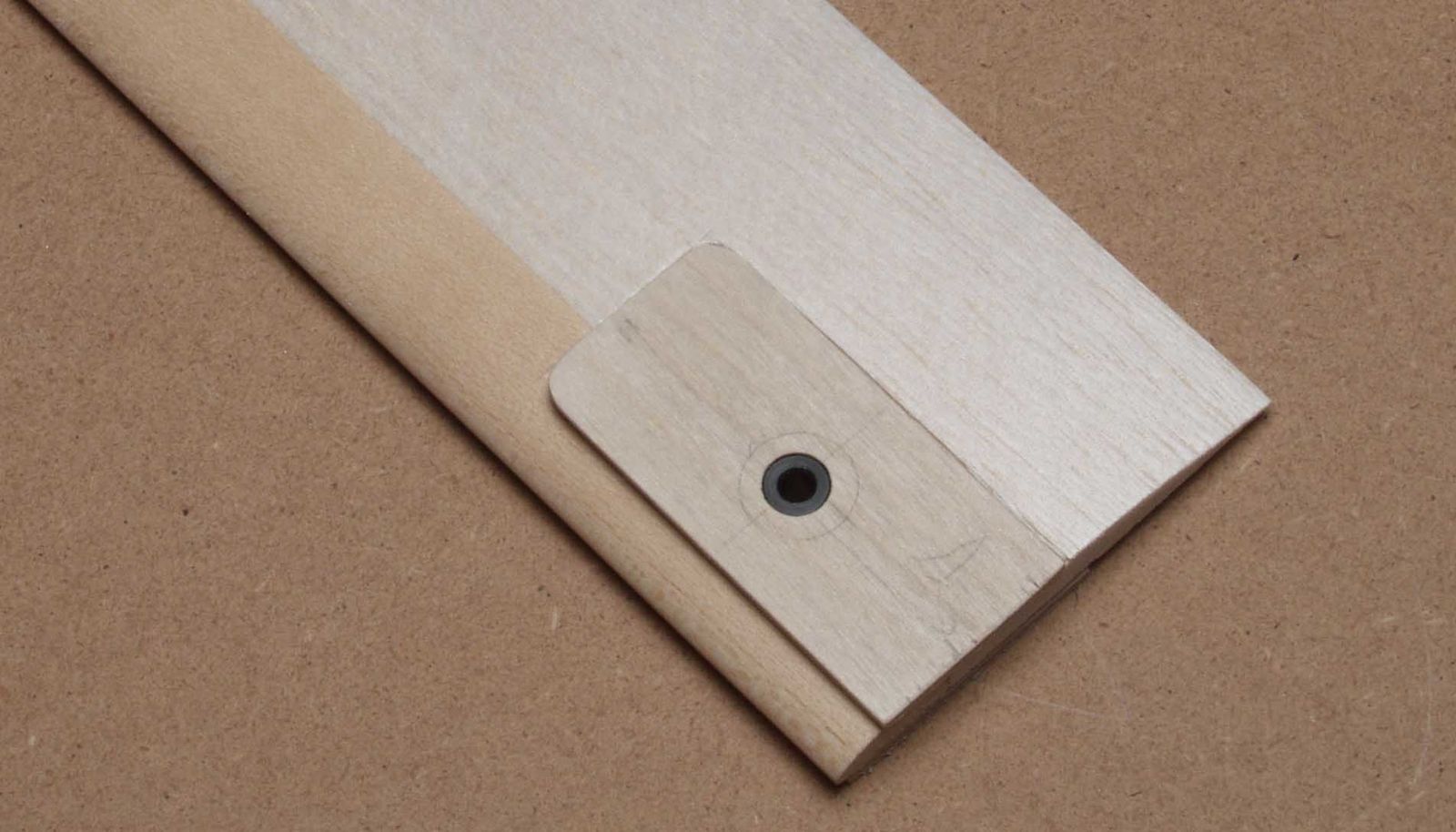
La vue prise sur le côté montre mieux le montage, les renforts ne sont pas encore collés ni même la pièce en Delrin. Au moment du collage il faudra placer une planchette sur le renfort du dessus ainsi q'un objet lourd. On pourra vérifier le parallélisme des deux renforts grace à la planchette qui elle doit être parallèle au plan de la table.
Voilà pour aujourd'hui...demain est un autre jour....la pensée philosophique :
Se pencher sur son passé , c' est aussi risquer de tomber dans l'oubli.......à méditer @ Plus.
Lundi 11 Mai 2009
Les renforts de fixation des pales sont collés, l' épaisseur ne devant pas être supérieure à 10 mm est respectée. La pale rentre dans son porte-pale sans aucun problème, le serrage par vis M4 est tip top.

Pour réussir un bon collage j'ai procédé comme le montre la photo. Un film plastique évite, suite à des coulures de colle, que la pale adhère à la table, deux profilés en alu 10x10 limitent l' épaisseur au serrage.

Le serre-joint presse la planchette, qui elle comprime les éléments à coller dans la limite de 10 mm d'épaisseur. Il y a toujours une certaine élasticité de la planchette qui fait qu' il est possible que la côte soit inférieure à 10mm, ce qui n'est en aucune manière génant...la mécanique aime les jeux fonctionnels ! Après séchage de la colle le pied à coulisse me donne une valeur de 9.9mm.....c'est pas beau ça !
Maintenant les pales peuvent être montées sur le rotor, ma grande curiosité est de vérifier le bon fonctionnement du moteur pré-lanceur..... petite déception prévisible !!, ....Le rapport de démultiplication est vraiment trop faible, je n' avais pas d'autres engrenages à ma disposition que 60 et 12 dents. Le moteur peine à démarrer, avec une petite poussette sur une pale il prend de la vitesse , les pales tournent de plus en plus vite, mais le contrôleur coupe l 'alimentation, il ne doit pas aimer ! Le courant maximum consommé est seulement de 3.4 A ce qui ne fait pas peur au moteur, en effet il est donné pour une puissance de 200W. Je pense que le problème vient du fait que le moteur peine à prendre des tours. Sans les pales j'ai réussi à faire tourner le rotor à plus de 2500tr/min ( test de sécurité ) sans pousser la puissance.
Conclusion : il va falloir revoir cette démultiplication, honnêtement je m'en doutais, n'oublions pas que le BR01 est un prototype et qui dit proto dit recommencer jusqu'à satisfaction.....ça va prendre plus de temps que prévu, en effet je dois commander les engrenages et modifier la mécanique.
Après la petite déception une bonne nouvelle, voilà notre autogire entièrement monté prêt pour son premier vol, la balance me siffle, j'ai de suite percuté.....La bête pèse 3.610 Kg.. les accus chargés !! elle dépasse donc de 110 g le poids limite que je me suis fixé, ce qui fait un surplus de poids de 3.05 % ....soyons magnanime pour cette fois ci.

Le voilà le BR01, il prend l'air sur le gazon , les pâquerettes se tournent vers lui comme par curiosité....il se la pète, il est fier, il se la joue, mais ce n' est pas le moment de frimer, il va falloir prouver que tu voles aussi bien que tu brilles au soleil. Patience, on n' y est pas encore, un retour à l'atelier est nécessaire, il est hors de question de prendre les airs avant que Papa ! te donne le feu vert( en plus ça rime )
Avant tout je dois régler le problème de la démultiplication, ensuite effectuer la finition des pales, et en dernier faire tous les réglages qui conditionnent l' éventualité d'un vol sans encombre. Alors il va falloir patienter un peu car le casting pour le pilote n'est pas encore ouvert. Nous sommes le 11 Mai, la construction a débuté le 16 Mars, voici donc presque deux mois que je bosse pratiquement 5 à 7 heures par jour. La construction prend du temps, les photos sont gourmandes en heures et pour le blog je ne compte même plus, mais ce n'est que du PLAISIR.
Voilà pour aujourd'hui ....demain est un autre jour....la pensée philosophique :
Avoir des enfants n' est pas à la portée de toutes les bourses.......à méditer @ Plus
Mercredi 13 Mai 2009
Comme le moteur pré-lanceur montrait un manque de puissance certain, je viens de le remplacer par un autre, un Axi 2820/ 12, à la prise en main il fait bonne figure avec ses 35 mm de diamètre. Une modification était à prévoir afin de pouvoir le monter, maintenant c' est chose faite.
Ce moteur est donc plus puissant mais son poids me donne du souci, en effet sur la balance il affiche 100g de plus que le précédent. L 'autogire pèse maintenant 3.710 Kg, la valeur maxi que je me suis fixée est largement dépassée, 210g c'est 210 g de trop ! Malgré tout j'ai effectué des tests de pré-lancement rotor, voici les valeurs des mesures.
Vu la puissance disponible le démarrage ne se fait pas en douceur, ça part sec toujours à cause du faible rapport de démultiplication.
Branché à un accu de 12 V les pales prennent de la vitesse à 300 tr/mn, la tension est de 10.9V et le courant 6.9 A
Je pousse la puissance à 400 tr/mn ( ça déménage ) la tension est de 10.6 V et le courant de 18.8 A
Avec cette démultiplication je n' arrive plus à prendre des tours, la résistance de l'air se fait sentir. Plus les pales prennent de la vitesse plus la consommation augmente et non d'une manière linéaire. En effet, à 300 tr/mm la puissance développée est de 75.2 W et à 400 tr/mn 199.2 W. A cette vitesse les pales tournent sans vibrations et le système du loquet qui débraye les engrenages et coupe l 'alimentation fonctionne à merveille....mais je ne suis pas satisfait du démarrage canon du rotor....j' ai déjà une autre solution en tête. C'est vrai , rien que pour pré-lancer le rotor, il reste, embarqué à bord, un moteur, un contrôleur et du câblage que je balade pour rien, au total ça fait une masse de 250g à 300g qui me limite mon autonomie...donc à suivre.
Je me suis amusé à déterminer le centre de gravité du BR01, suspendu par l 'axe du rotor le CG se situe sur l'axe vertical du mât. Je l'ai suspendu cette fois ci par la roue avant avec rotor et pales, l'autogire s' incline et garde sa position en équilibre. Un fil à plomb fixé au même crochet me matérialise la verticale. Le fil vient croiser l'axe du mât , c'est à cette intersection que se trouve le CG. Pour être clair, le centre de gravité se trouve exactement 3 cm sous l' axe de poussée du moteur principal, sur le mât.
Pour déterminer le CG des pales j'ai démonté un porte- pale avec ses deux rotules et je l' ai fixé sur une pale. Ainsi monté j'ai recherché le point d' équilibre sur le chant d'un profilé aluminium de 2.5mm d' épaisseur. Le CG de la pale se trouve à 30,4 cm de l'axe de pivotement des rotules et le poids est de 125g.
Avec toutes ces mesures on a de quoi faire des calculs intéressants...force centrifuge...angle de conicité..vitesse de rotation nécessaire du rotor pour une conicité inférieure à 5º.
Pour mesurer la vitesse de rotation des pales j' ai suspendu au plafond de mon atelier une lampe de poche qui éclaire le dessus des pales. Bien immobilisé, l'autogire est posé sur une table, sur cette dernière j' ai placé mon tachymètre coincé dans un petit étau, la diode photo sensible éclairée par la lumière de lampe de poche. Au passage d'une pale le rayon lumineux est brisé et le tachymetre compte le nombre de tours, il est évident de programmer celui ci en mode trois pales.

Voici donc le tachymetre acheté chez Conrad, il est sans problème. Attention l'éclairage par tube fluorescent perturbe la mesure.
Voilà pour aujourd' hui ....demain est un autre jour.....la pensée philosophique :
Souffrant d' insomnie, j' échangerai un oreiller de plumes contre un sommeil de plomb. à méditer..@ Plus.
Jeudi 14 Mai 2009
Aujourd' hui il n'y aura pas de photos, vous êtes prévenus ! mais pour compenser on va faire un peu de math et de la géométrie....j' en vois qui râlent au fond de la classe ...rassurez vous, ça va être très ludique .Bien sûr tous ces exercices se rapportent à notre autogire et non aux déclarations d' impots qui sont d' actualité en cette période.
Hier j' ai parlé de force centrifuge des pales, aujourd' hui nous rentrons dans le coeur du sujet, je vais donc calculer la force de traction qu' exerce une pale sur l'axe des rotules de battement.
Voici la formule mathématique :
F = ( m x VxV ) / R Les unités sont F= Newton m = Kg V = m/s R = m
Caractéristiques de la pale :
CG = 0.34m de l'axe Rotor R = 0.34 Masse = 125 g m = 0.125 Kg
Calcul de la vitesse de la pale au point du CG.
3.14 x D x tr/s = m/s D = diamètre = 2R = 0.34 x 2 = 0.68 m
Pour le calcul on choisit une vitesse de rotation du Rotor de 600 t/min = 10 tr/s
soit : 3.14 x 0.68 x 10 = 21.35 m/s soit 77 km/h
En appliquant la formule du haut nous obtenons la force centrifuge.
0.125 x 21.35 x 21.35 / 0.34 = 167.6 N
Pour se faire une idée, cela représente une force égale au poids d'un demi sac de ciment soit 17 Kg
Chaque pale exerce la même force sur le rotor soit : 167.6 x 3 = 502.8 N
Conclusion:
On ne rigole pas avec la solidité des rotules ainsi que les axes de fixation. En bout de pale la vitesse est de 217 km/h
Maintenant on aborde le sujet de la conicité
L 'autogire est au sol, quand les pales tournent à 600 tr/min elles exercent chacune la même force perpendiculaire à l'axe du rotor. Supposons que les pales tirent l'autogire vers le haut, la masse de ce dernier tend à tirer vers le bas les pales au niveau de l'axe de rotation, il se forme une conicité. . Quand les pales tournent dans le même plan, le dièdre fait 0,º l' angle de conicité 180 º. On en conclut que si la conicité diminue l' angle le dièdre augmente d' autant. Il est souhaitable, pour l'angle de dièdre de ne jamais dépasser une valeur de 5.º
Méthode simplifiée pour déterminer l'angle de dièdre
On sait que l 'autogire à une masse de 3.7 kg
On sait que chaque pale exerce une force de 167.6 N et qu'elles sont au nombre de 3
Pour faire simple on va dire que les 3 pales ont une force de traction de 17 kg x 3 = 51 Kg
Pour représenter ces valeurs en géométrie les Kg vont devenir des cm ce qui donne 3.7cm et 51 cm.
Voilà, nous avons tout ce qu'il nous faut, sauf une règle, un rapporteur d'angle et deux feuilles de papier A4.
Dans le bas de la feuille on trace une droite parallèle au bord, à 3.7 cm au dessus de celui ci sur toute la longueur des deux feuilles A4 mises l'une à côté de l'autre dans le sens de la longueur.
L ' astuce est la suivante , avec la règle il faut tracer une droite partant du coin de l' angle gauche de la feuille, on incline la règle jusqu' à ce que la longueur de 51 cm vienne se superposer sur la droite parallèle tracée précédemment.
Cette droite fait un angle alpha avec le bord bas de la feuille, c'est notre angle de dièdre, il suffit alors, avec un rapporteur d'angle, d'en lire la valeur. C 'est simple non ?
Avec nos valeurs nous obtenons un angle de dièdre de 4º ( ou encore sinus alpha = 3.7 / 51 = 0.072 soit 4º ) ce résultat est correct pour une vitesse de rotation du rotor de 600 tr/min, on peut faire diminuer cet angle en ajoutant du lest aux pales ...mais le hic c'est que la vitesse de rotation au moment du décollage on ne la connait pas. Une seule solution, se construire une soufflerie et mesurer les tr/min au moment où l'autogire quitte le plancher des vaches..sérieusement ce n' est pas raisonnable, mais une valeur de 600 tr/min pour la taille du BR01 est plus que probable
.
Détermination simplifiée de la poussée nécessaire du moteur pour un décollage selon l' angle d' inclinaison du rotor.
Cette méthode géométrique est simple également mais elle ne tient pas compte de tous les paramètres mis en cause, elle permet juste d'avoir un ordre de grandeur.
Sur une feuille de papier A4 ( paysage ) on trace au milieu une droite parallèle au bord bas. Toujours au milieu de la feuille on trace cette fois ci une droite verticale perpendiculaire à la précédente.
Au point d' intersection des deux droites on reporte sur la droite verticale un point à 37mm vers le bas. A ce point on trace en rouge à nouveau une parallèle au bord bas de la feuille ( si ce n'est pas en rouge ça ne marche pas...!!)
Maintenant, toujours avec le rapporteur d'angle on trace une droite inclinée à 7º ( angle d' inclinaison du rotor ) passant par le point d' intersection des deux premières droites que nous avons tracées....c'est toujours clair ? (.si non... assis devant on ne voit pas derrière !! )
Pour terminer le traçage il suffit de tirer une droite perpendiculaire à celle ci passant aussi par le point d' intersection. Si on ne déplace pas le rapporteur il suffit de marquer un point à 97º et de ce point tracer la droite. Voilà c'est fait, mais qu'est ce que cela va nous rapporter ? C 'est très simple, la dernière droite que l 'on vient de tracer coupe la droite en rouge en un point. En mesurant la distance de ce point à la droite verticale on obtient en mm la force de poussée du moteur en grammes ( 1mm = 100g )
Dans notre exemple on peut lire 5 mm soit 500 g de poussée. Pour une lecture plus précise on peut donner un facteur multiplicateur de 2 soit 37mm x 2 = 74 mm, il ne faudra pas oublier de diviser par 2 la valeur de la mesure.
Conclusion : On peut refaire cet exercice avec d'autres angles, 20º par exemple soit 2900g de poussée, de cette façon il est facile de choisir un moteur qui tienne la route avec bien sûr de la réserve sous le pied. Encore une fois tout ceci est très approximatif mais parlant.
Avant de modifier mon rotor pour y placer une démultiplication plus importante, je vais réaliser un autre système qui ne nécessite plus de moteur pré-lanceur ni de contrôleur. Le pré-lancement sera tout automatique à partir d'une base au sol. Tout se fera par la télécommande au moment d' actionner le moteur principal. Résultat des courses , l' autogire devient plus léger, le temps de vol se trouvera rallongé, et il y a un moteur de moins exposé à une casse éventuelle, sans oublier qu'il n' est plus nécessaire d' avoir un esclave qui vous seconde ....il pourra garder la bière au frais et faire des photos .!!!
Voilà pour aujourd' hui... demain est un autre jour.......la pensée philosphique :
Pour 400 Euros mon psychiatre m'a débarrassé de ce que j' avais... c' est à dire, 400 Euros...à méditer
.
@ Plus Un grand coucou à mon ami Jean Cousin
Samedi 16 Mai 2009
Quand j'ai une idée en tête il faut que je la concrétise, en attente de recevoir les engrenages pour améliorer la démultiplication, j'ai réalisé un nouveau support de rotor ne nécessitant plus de moteur pré-lanceur.

A gauche de l 'axe de pivotement une tête de vis six pans creux transmet la rotation d'un moteur pré-lanceur placé au sol, à l'autre extrémité de la vis un pignon de 16 dents. La vis M 8 a été usinée pour pouvoir être montée dans deux roulement 6x19.
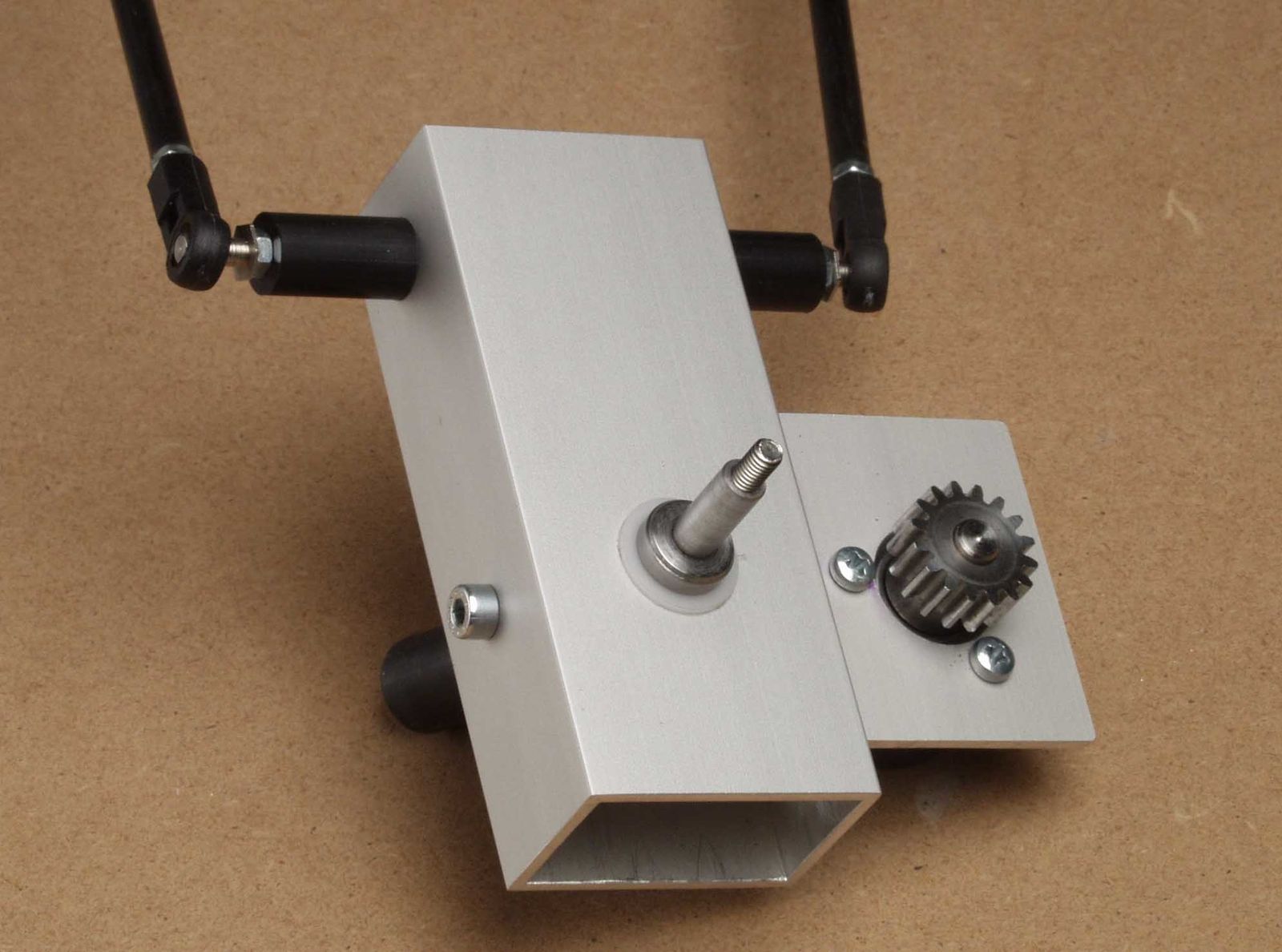
Le support est plus rigide tout en étant moins lourd, l'engrenage de 16 dents va entraîner le rotor par l'intermédiaire d'un tube en carbone qui relie le rotor au moteur prélanceur au sol.
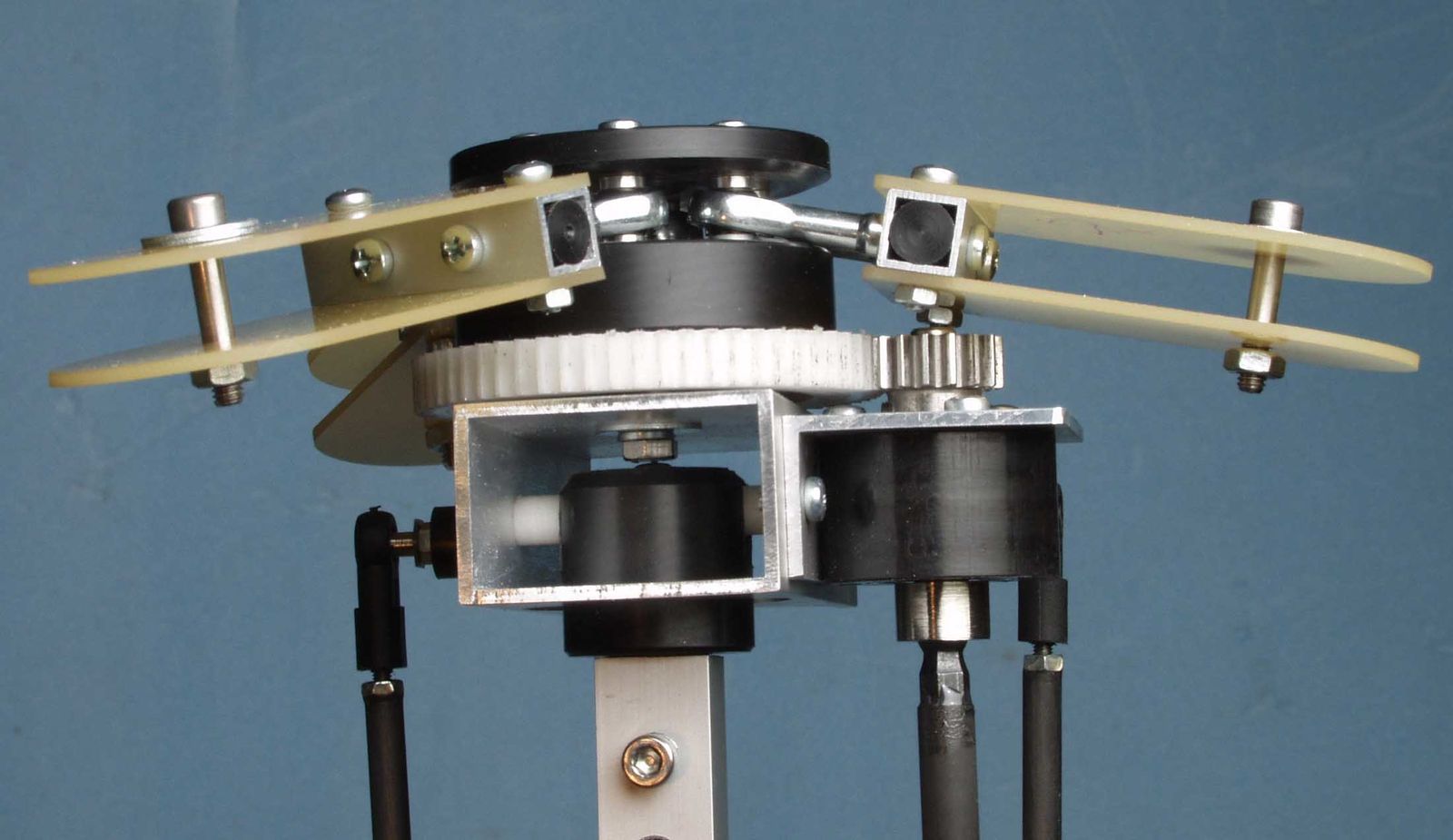
Dans la tête de la vis, le tube carbone, dans lequel a été collé à l'Araldit un bout de clé six pans à tête sphérique, transmet le mouvement de rotation au rotor. Le tube carbone sera guidé par des roulements fixés au mât, il restera en place et aura la chance de profiter du vol.
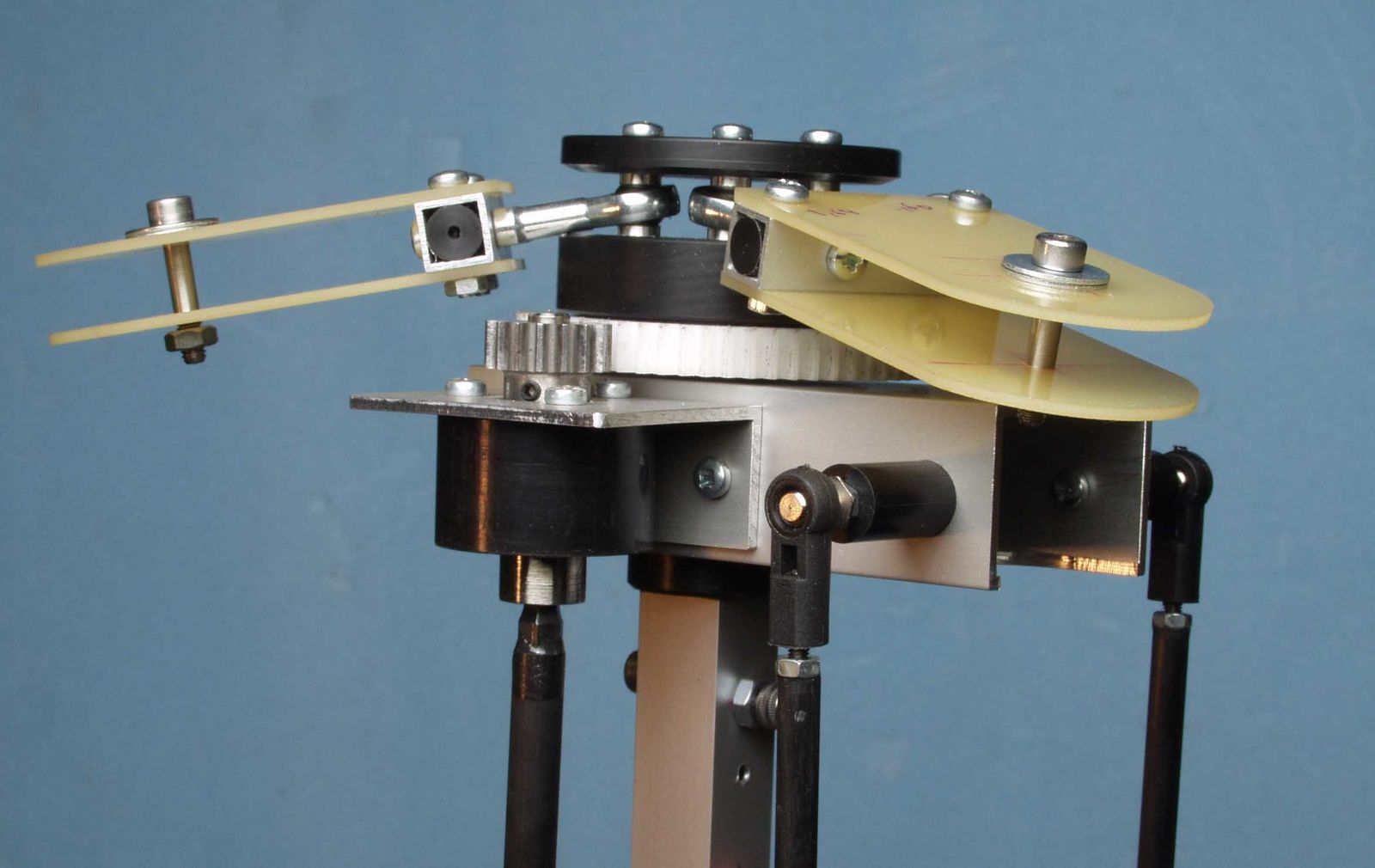
Une autre vue montre le mécanisme sous un angle différent, plus de moteur, moins de poids, que réclame le peuple.

Au sol, le tube en carbone, par le même principe, reçoit le mouvement de rotation du moteur dans le rapport 1/3. Il est possible de choisir un autre rapport mais je ne disposais de rien d'autre. Pour faire des essais de fonctionnement ça fait l'affaire. Là aussi une vis six pans est utilisée elle a été également usinée pour être montée dans des roulements.

En poussant le moteur aucune vibration ne se manifeste, pour le moment je n'ai pas encore fait le test avec la rotation du rotor.
Suite de ce texte: voir l'article "construction d'un autogire RC - suite"
Fortsetzung: siehe "construction d'un autogire RC - suite"














 )
)






















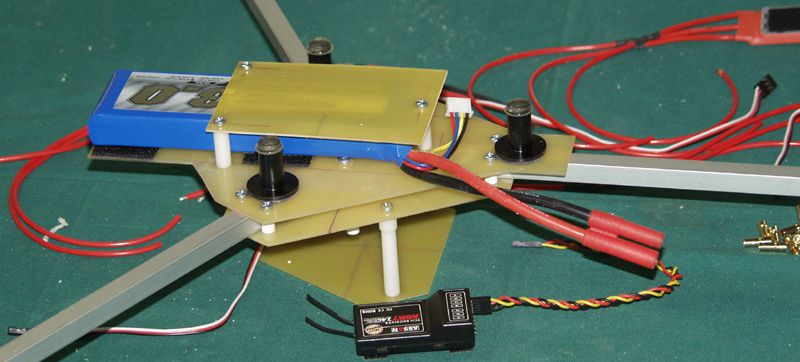













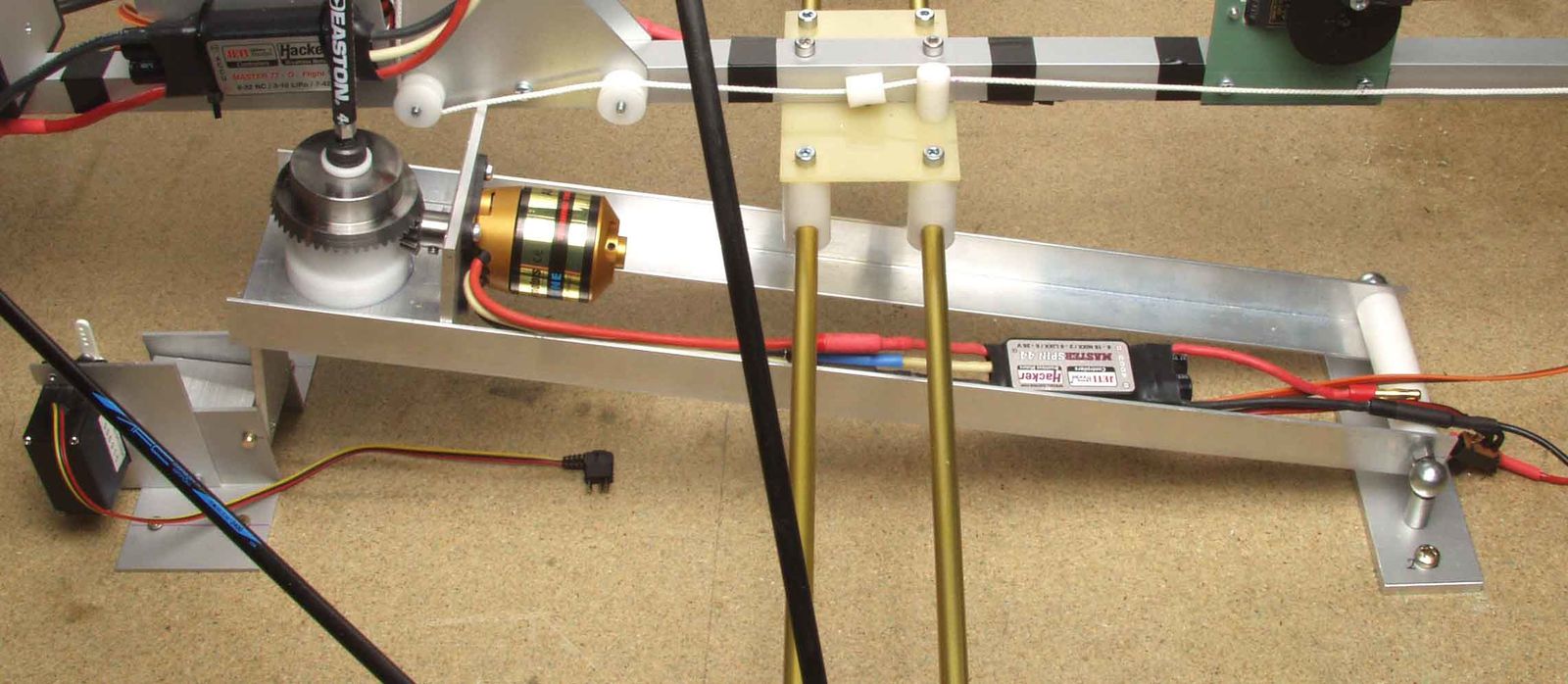


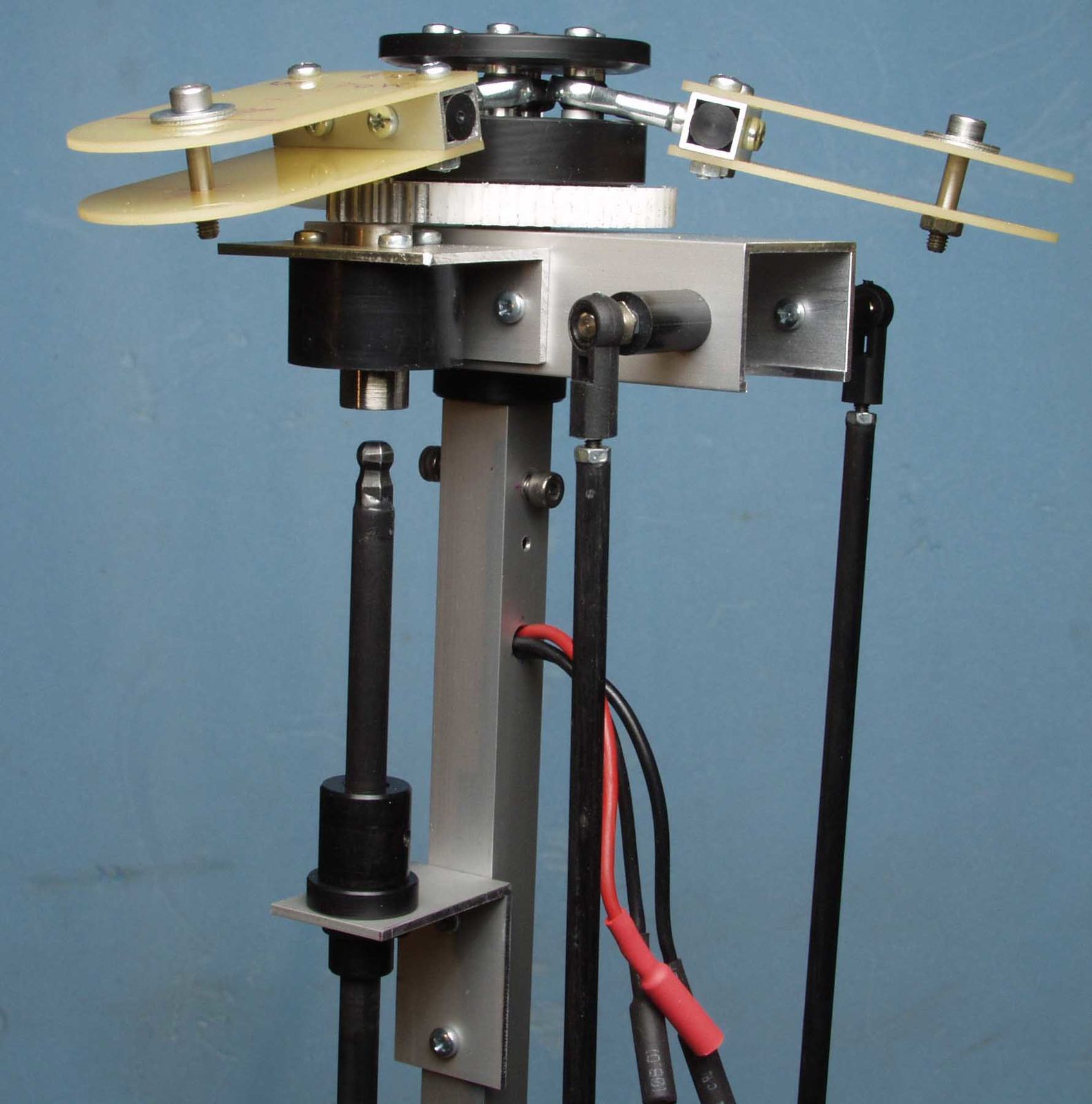








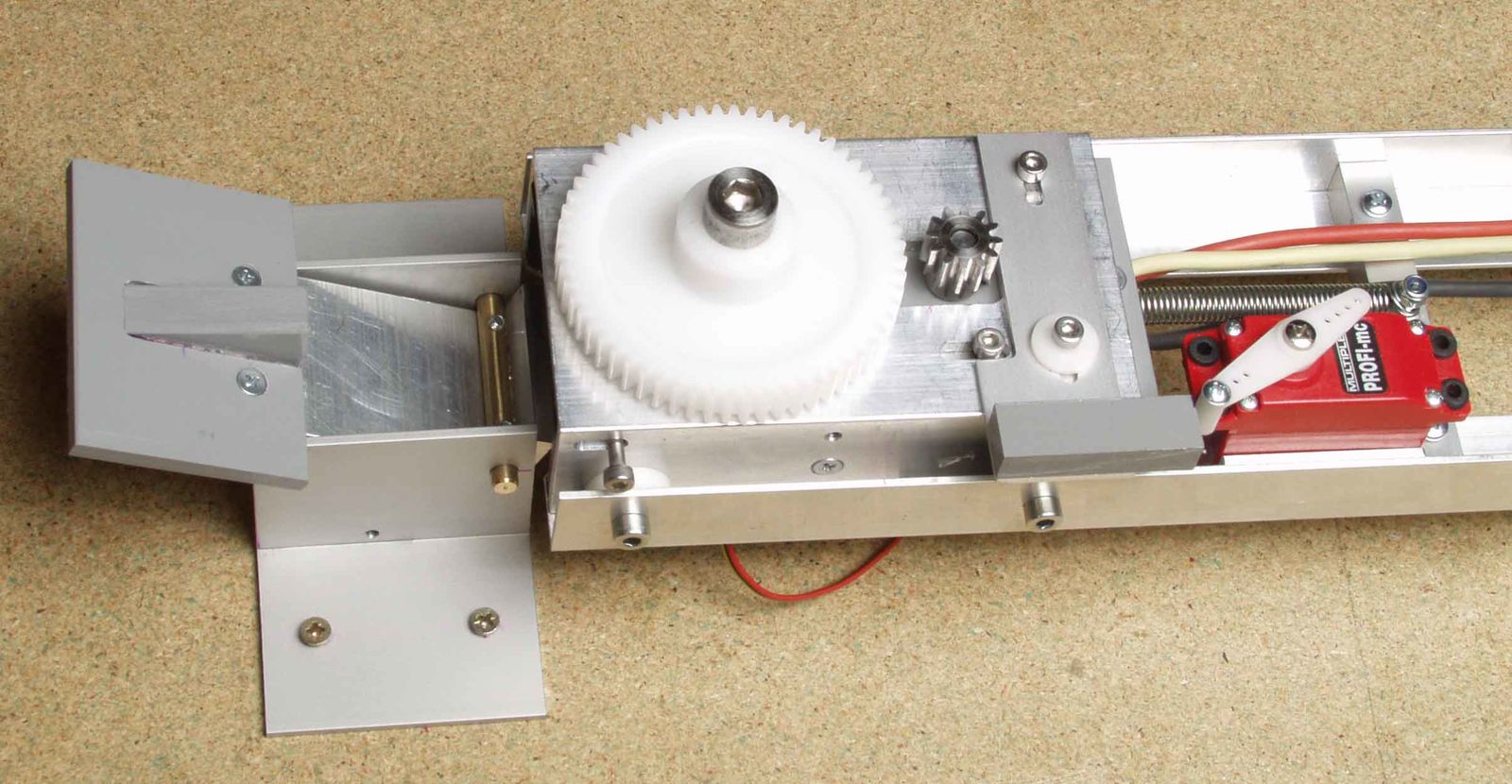


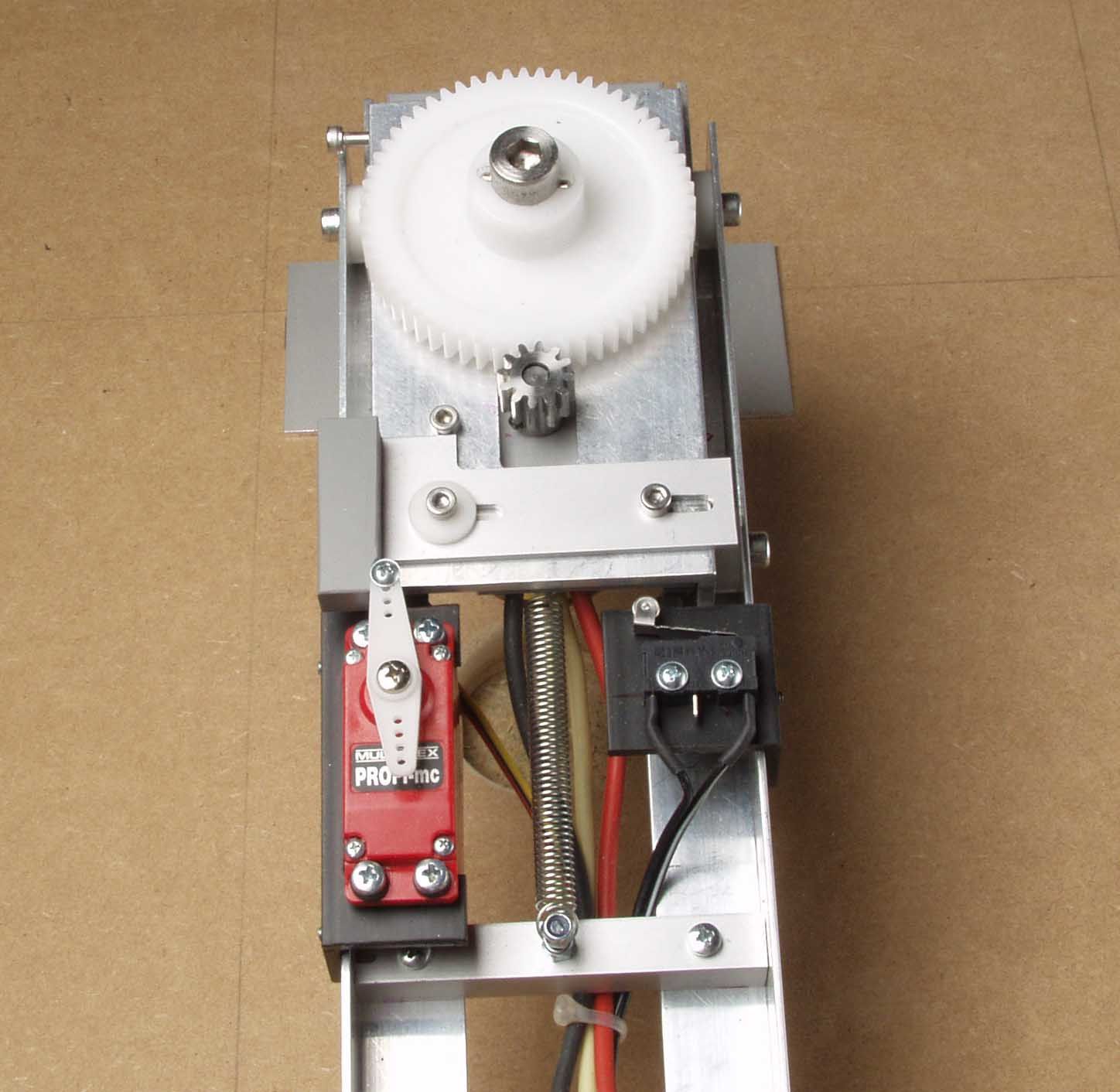

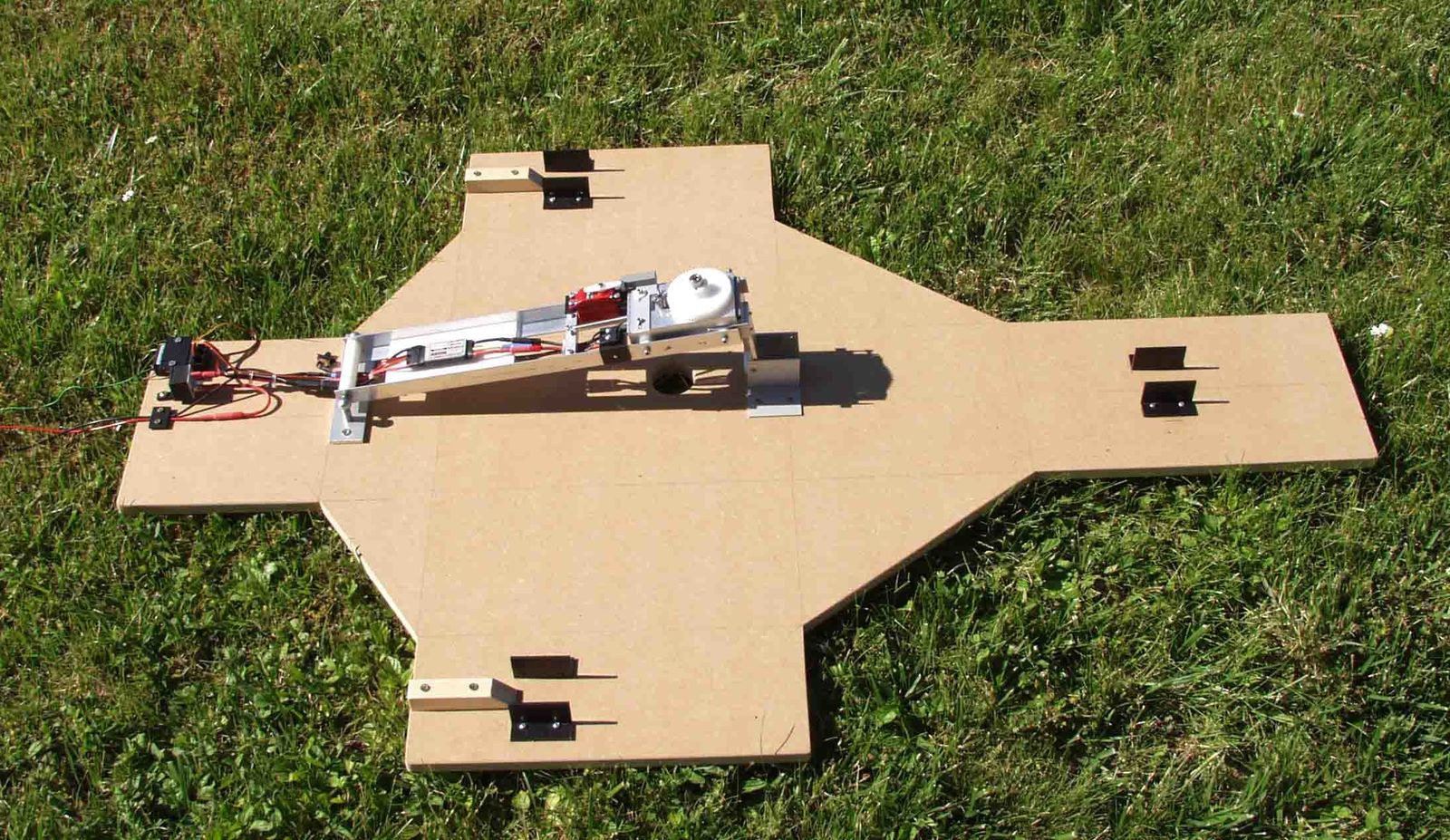



 Quel est l' homme politique ?.........
Quel est l' homme politique ?.........